Hampir sebagian besar dari foto yang selama ini saya hasilkan, merupakan hasil dengan nikon system . Kalau anda bertanya mengapa saya memakai system ini tidak system yang lain, alasan saya adalah karena saya terlanjur memilih system ini seperti yang anda ketahui, semangkin lama seseorang menggunakan sebuah system semangkin sulit untuk merubah system yang anda pakai.
Sejalan dengan waktu (hampir kira-kira 20 tahun mengenal hobby fotografi), sekarang saya menggunakan system nikon dengan lensa mulai dari 15mm-500mm, dengan berapa body Analog & Digital (FF / APS)
Secara keseluruhan gambaran system yang saya pergunakan:
Body Analog:
nikon F4
nikon F3 Pinslide
nikon F801
nikon FM2n
nikon FG20
Body Digital:
nikon D50 (APS)
nikon D850 (FF)
nikon D500 (APS)
Lensa:
Zeiss Distagon 15mm/2.8 ZF2
nikkor AF 20mm/2.8
Samyang TS 24mm f3.5 ED AS
Mamiya-Sekor 35mm/3.5 N , Zorkendorf PC
nikkor AF 35mm/2.0D
Voigländer Ultron 40mm/2.0 SL
nikkor 50mm /1.8 AiS
Olympus Zuiko Macro Auto 50mm f3.5 dengan olympus OM – Nikon F adapter
Olympus Zuiko Macro Auto1:1 85mm f4 dengan olympus OM – Nikon F adapter
Olympus Zuiko Macro Auto1:1 135mm f4.5 dengan olympus OM – Tube Leitax Nikon F adapter
nikkor AF 85mm/1.8
nikkor 85mm/2.0 AiS
nikkor AF macro 105mm/2.8
nikkor 135mm/2.0 AiS
EL APO Nikkor 135mm/5.6
nikkor 400mm/3.5 AiS
nikkor 500mm/4.0 P
nikkor AFD 80-200mm/2.8
zoom nikkor 35-105mm/3.5-4.5 AI-S
nikkor AFS 17-55mm/2.8 DX
Telekonverter:
TC 14B
TC 301
Assesorie:
Blitz SB 24, SB15, SB700
SD 7 Blitz powerpack
SU 4 Blitzsensor
SK17 TTL blitzkabel
Kenko makro tube (modifikasi)
PB4 (modifikasi) dengan lensa EL APO Nikkor 135mm/5,6 & PS4
Zorkendorf PC adapter dengan lensa Mamiya 35mm/3,5 sebagai PC lensa
Berbagai Adapter dan Filter
Bersamaan dengan waktu berjalan, cuma lensa nikkor AFD 80-200mm/2,8 (D850) & nikkor AFS 17-55mm/2.8 (D50/D500) sebagai lensa zoom yang masih saya pakai, selebihnya saya lebih suka untuk memakai lensa fix lens ( terutama 35mm, 85mm & 20mm), kalau saya hanya bisa membawa 1 lensa maka saya memilih untuk keluar dengan lensa 40mm.
[plantuml]
Alice -> Bob: Authentication Request
Bob --> Alice: Authentication Response
Alice -> Bob: Another authentication Request
Alice <-- Bob: another authentication Response
[/plantuml]
Remark this process can take hours for buiding installer!
Looking in indexes: https://pypi.org/simple, https://www.piwheels.org/simple
Collecting wxpython
Using cached https://files.pythonhosted.org/packages/b0/4d/80d65c37ee60a479d338d27a2895fb15bbba27a3e6bb5b6d72bb28246e99/wxPython-4.1.1.tar.gz
Requirement already satisfied, skipping upgrade: pillow in /usr/lib/python3/dist-packages (from wxpython) (5.4.1)
Requirement already satisfied, skipping upgrade: six in /usr/lib/python3/dist-packages (from wxpython) (1.12.0)
Requirement already satisfied, skipping upgrade: numpy in /usr/lib/python3/dist-packages (from wxpython) (1.16.2)
Building wheels for collected packages: wxpython
Running setup.py bdist_wheel for wxpython ... done
Stored in directory: /home/andie/.cache/pip/wheels/54/32/da/dc5c828a12bc9a1ca58d5555f1076fd7d2984ae9c0e03eb510
Successfully built wxpython
Installing collected packages: wxpython
The scripts helpviewer, img2png, img2py, img2xpm, pycrust, pyshell, pyslices, pyslicesshell, pywxrc, wxdemo, wxdocs and wxget are installed in '/home/andie/.local/bin' which is not on PATH.
Consider adding this directory to PATH or, if you prefer to suppress this warning, use --no-warn-script-location.
Successfully installed wxpython-4.1.1
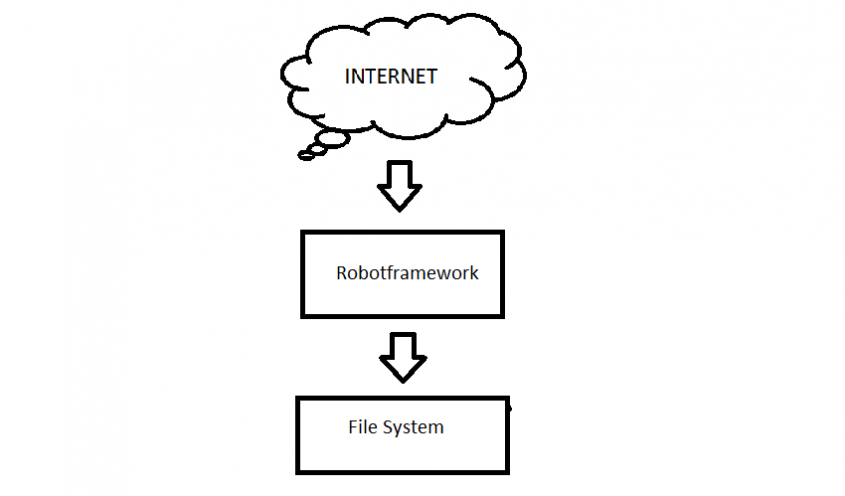
Pada umumnya pengguna Robotframework, menggunakan Web interface Library ( SeleniumLibrary , Browser Library ) untuk automatisasi download data dari Internet.
File download with Robotframework
Sebenarnya banyak cara lain yang lebih mudah digunakan untuk tujuan tersebut.
${download_status} run Process curl -O ${download_uri} > ${download_target} shell=True
log many ${download_status.rc} ${download_status.stdout} ${download_status.stderr}
Directory Should Not Be Empty ${download_folder}
File Should Exist ${download_target}
Create Session download ${HOST} verify=False debug=1
${response} Get On Session download ${MSI}
log many ${response}
Create Binary File ${download_target} ${response.content}
Directory Should Not Be Empty ${download_folder}
File Should Exist ${download_target}
Kelemahan dan Problem yang ada akan hadapi dengan menggunakan Methode 1. adalah hanya akan befungsi untuk plain text data , atau juga data yang tidak dengan format biner.
Untuk data-data dengan format biner, contohnya *.MSI anda akan mendapat Problem seperti ini, pada saat mencoba untuk menggunakan data tersebut.
Windows *.MSI data rusak dalam process download .
Hanya dengan Methode 2. anda akan mendapatkan File biner (*.MSI) tanpa kerusakan.
Semoga informasi ini berguna untuk pengguna Robotframework dimana saja.
Lensa macro kedua yang saya pergunakan dengan kamera DSLR, adalah Olympus Zuiko Macro Auto1:1 85mm f4.
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Olympus sebagai produsen Fotografi optik juga terkenal, dengan Produk (lensa macro) yang mempunyai kwalitas yang sangat baik , lensa ini menarik untuk saya karena jarak ke motiv yang sangat nyaman untuk pemotretan, dan kalau digunakan langsung dengan nikon D50 & Dandelion Chip Tube saya (22mm). saya dapat menggunakan on Body Flash untuk pemotretan macro saya.
Dalam artikel ini saya mencoba untuk menjabarkan mengapa saya menggunakan lensa olympus macro untuk membuat slide copy dengan nikon DSR kamera saya.
Seiring dari migrasi PC saya dari windows XP ke MAC, saya menemui hal yang agak mengganggu dalam kegiatan fotografi saya, sebelum berpindah ke MAC semua slide Analog saya selalu saya digitalisasi dengan Film Scanner (Canon Canoscan 2700) , scanner ini mesih menggunakan SCSI2 interface untuk dihubungkan dengan PC, setelah migrasi ke MAC , ternyata sangat sulit untuk mencari Driver serta Adapter untuk menghubungkan USB ke SCSI2, karena itu saya mencari solusi bagaimana mendigitalisasi film atau slide saya.
Beberapa waktu yang lalu saya temukan solusi yang menarik untuk digitalisasi Slide dan Negativ saya dengan Lensa Macro (Olympus OM Zuiko Auto Macro 50mm/F3.5 ).
Transfer Slide to digital with Nikon PB4 and PS4 on D850 & Zuiko 50mm Macro lens
Dandelion TubeDandelion TubeDandelion TubeDandelion Tube, OM-AI Adapter, ZUIKO OM AUTO Macro 50mm/F3.5
Mengatur fokus dengan Live view mode pada D850 mudah dan nyaman. Waktu digitalisasi juga lebih cepat dibandingkan dengan menggunakan film scanner.
Berikut ini lensa Olympus Zuiko OM yang saya gunakan:
Olympus Zuiko Macro Auto 50mm f3.5
Olympus Zuiko Macro Auto 1:1 80mm f4 & Close-up Lens 80mm Macro f=170 mm
Olympus Zuiko MC Auto-Macro 135 mm f4.5
Telescopic Auto Tube 65–116 (with Leitax nikon converted & original olympus om zuiko)
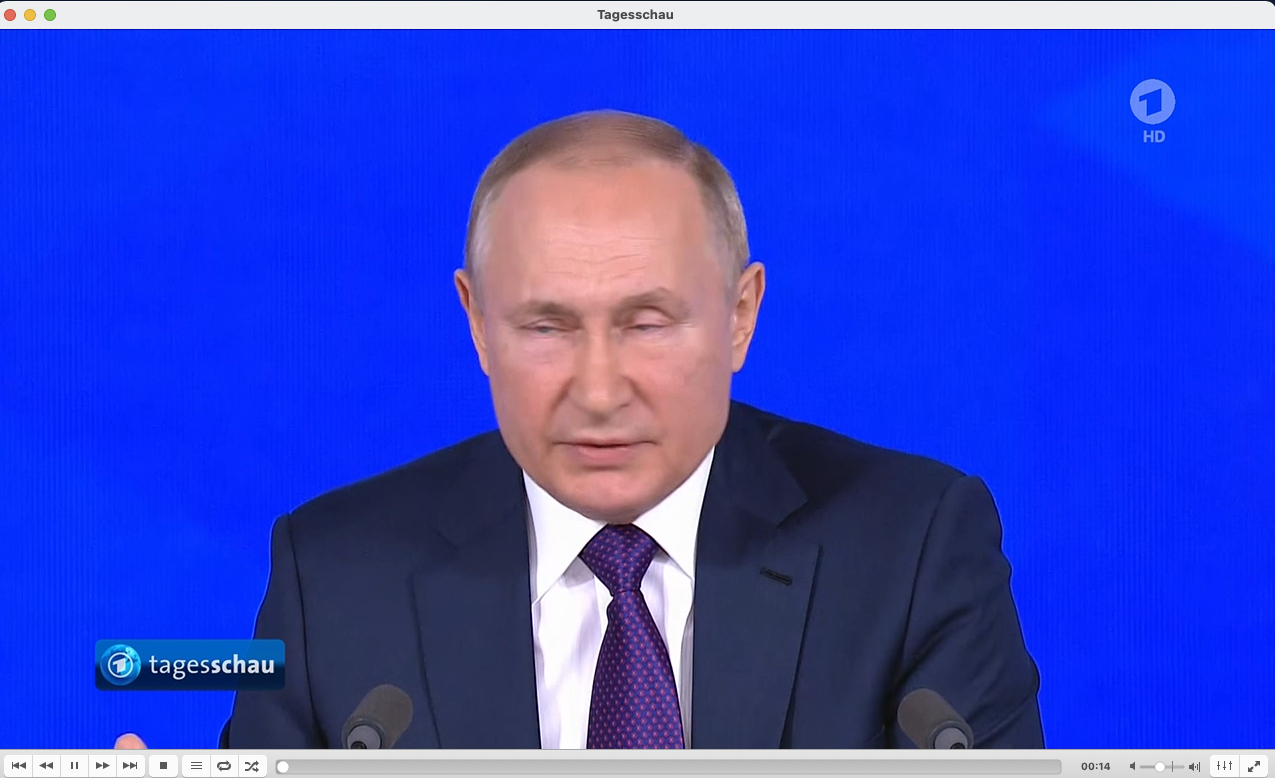
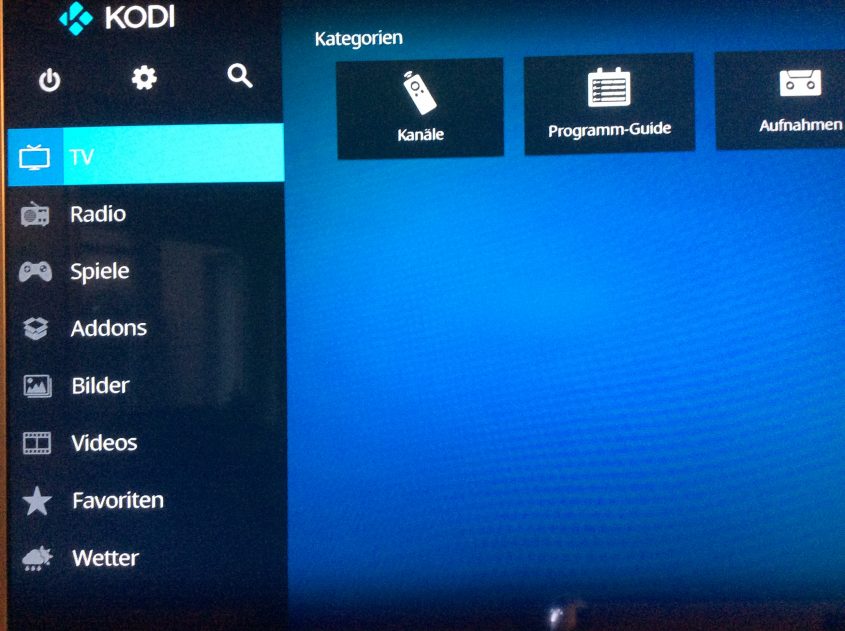
Kali ini saya akan mengungkapkan pengalaman saya menggunakan Raspberry Pi dengan KODi OS (LibreElec) sebagai Media Player untuk signal TV Satelit ke IP.
Solusi ini saya pilih karena reciever SAT to IP yang saya miliki tiba-tiba rusak. Dan jenis reciever ini tidak lagi diproduksi oleh Devolo.
Devolo SAT > IP Reciever
Semulanya TV system saya terhubung sebagai berikut:
system semula: TV Satelit Antena -> Devolo SAT-IP Server -> Router -> Devolo SAT-IP Reciever -> TV(hdmi-in)
Problem dalam system: TV Satelit Antena -> Devolo SAT-IP Server -> Router -> Devolo SAT-IP Reciever(tidak berfungsi) -> TV(hdmi-in)
Solusi: TV Satelit Antena -> Devolo SAT-IP Server -> Router -> Raspberry pi 3b (KODI OS) -> TV(hdmi-in)
Ide ini timbul karena selama ini saya dapat langsung menikmati Program TV SAT to IP Program lewat SAT > IP apps (dengan IPHONE & IPAD).
SAT > IP App
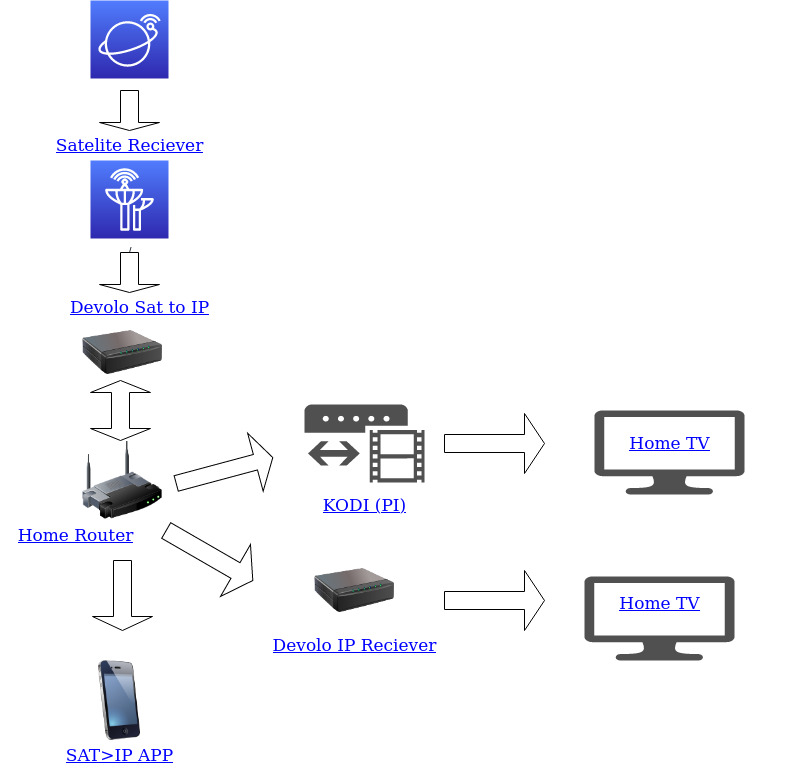
Berikut Ini sketsa solusi Implementasi hardware IPTV dan SAT to IP :
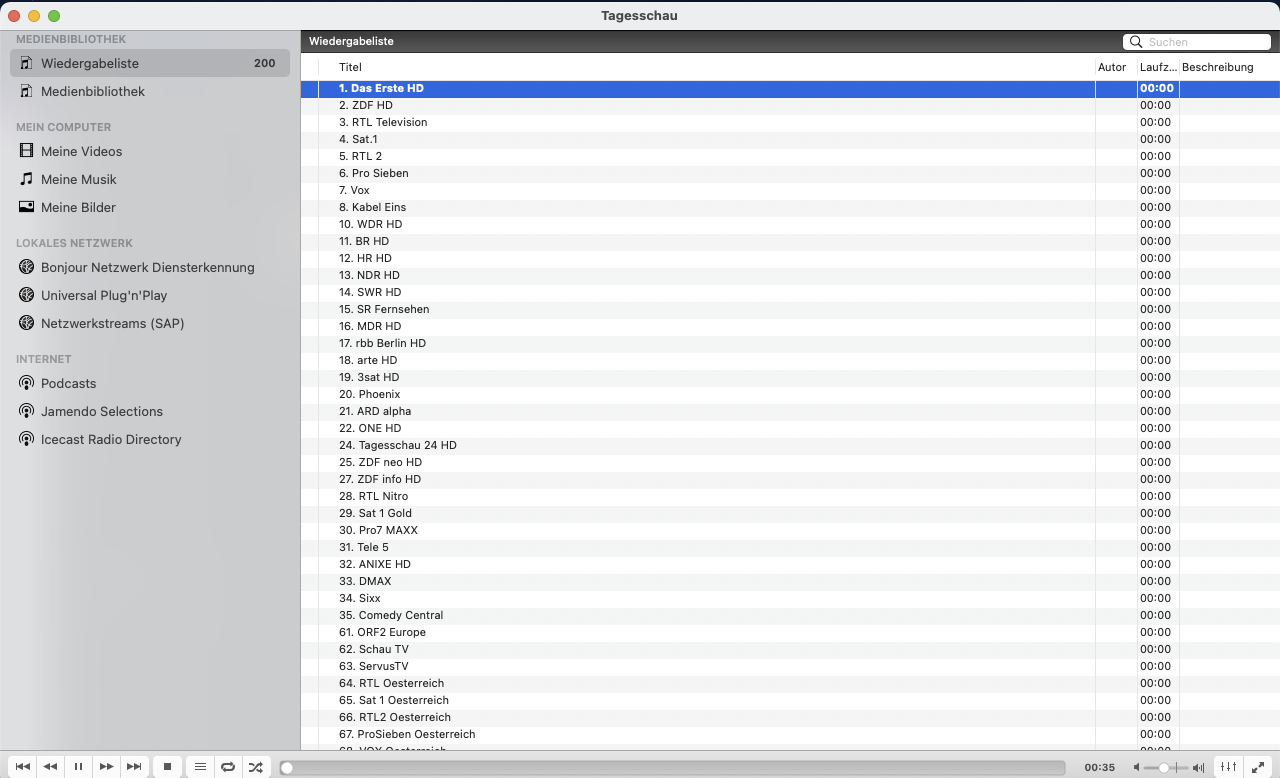
Untuk mencoba apakah channel list ini dapat dipergunakan di KODI, saya melakukan ujicoba sebagai berikut:
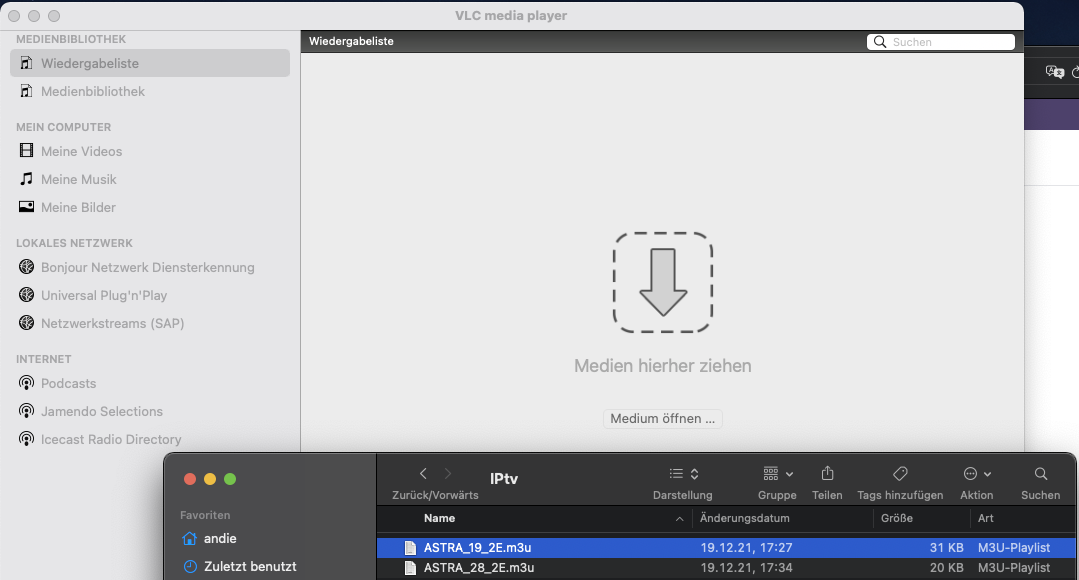
Saya coba untuk menggunakan m3u files yang saya dapatkan di atas, untuk diupload di VLC Viewer sebagai Mediaplayer List:
VLC Media Player m3uVLC Media Player m3u VLC Media Player Sat ProgramVLC Media Player Sat Program Access OK
Solusi ini dengan VLC ternyata berfungsi dengan baik, sekarang saatnya saya mencoba untuk menggunakan m3u file tersebut sebagai konfigurasi tv di KODI.
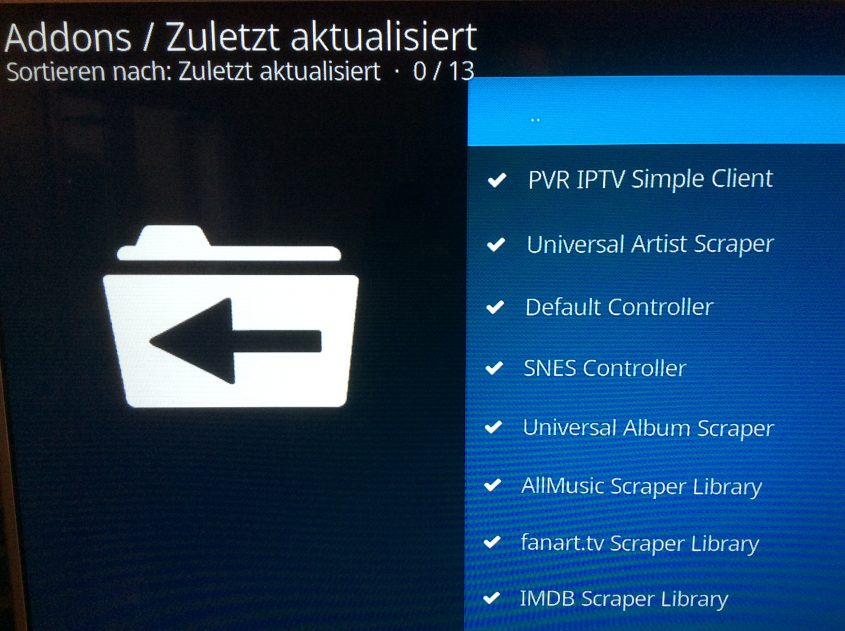
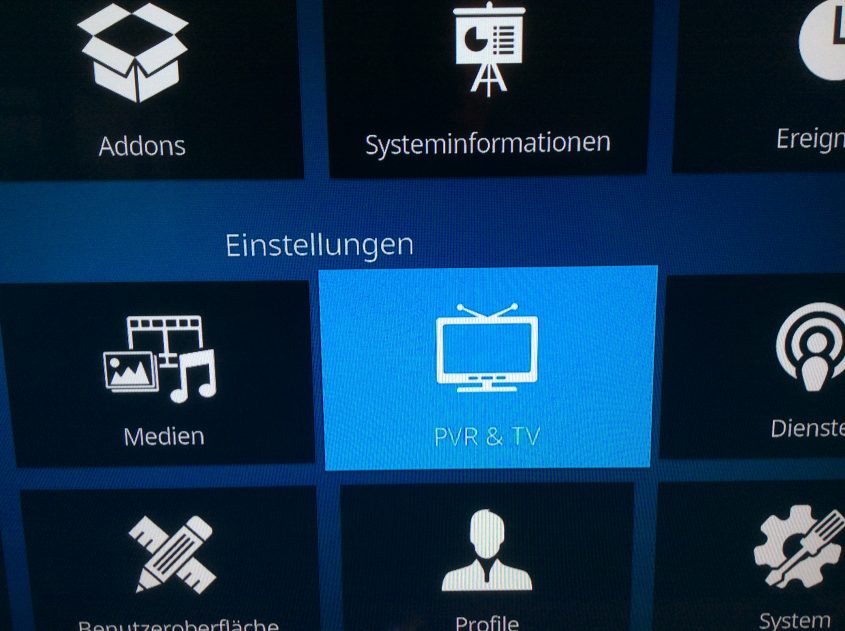
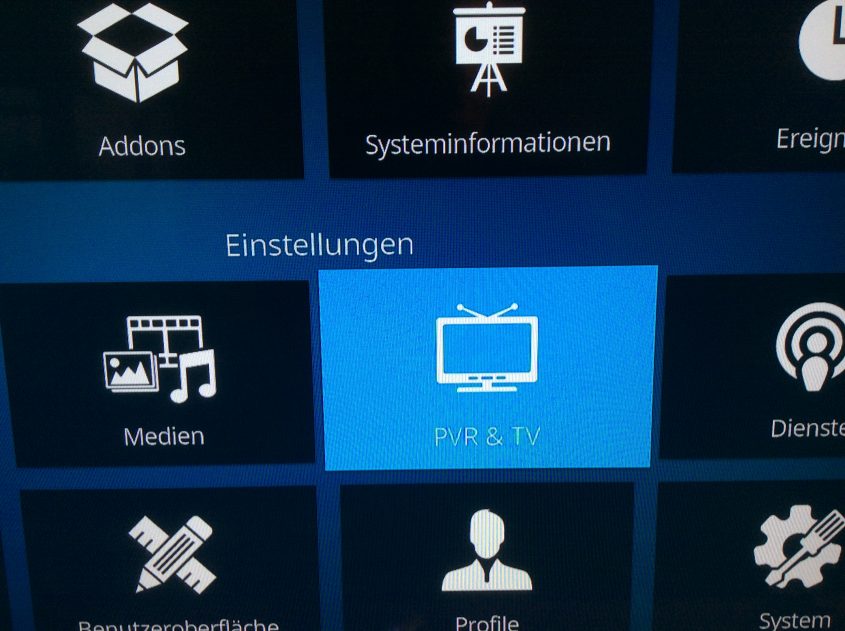
Persiapan untuk konfigurasi KODI:
Instalasi OS KODI di raspberry pi 3b
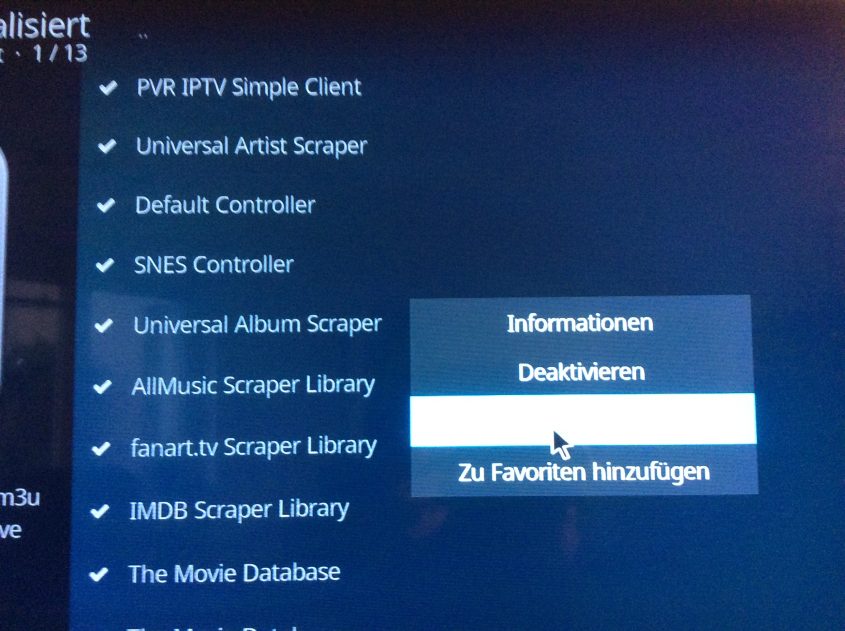
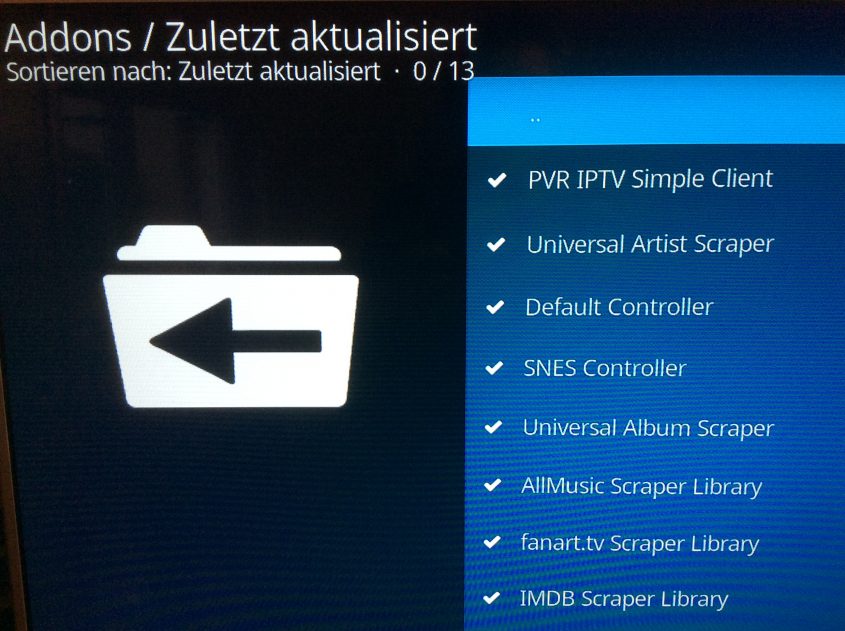
Konfigurasi KODI dengan PVR IPTV Simple Client Addon
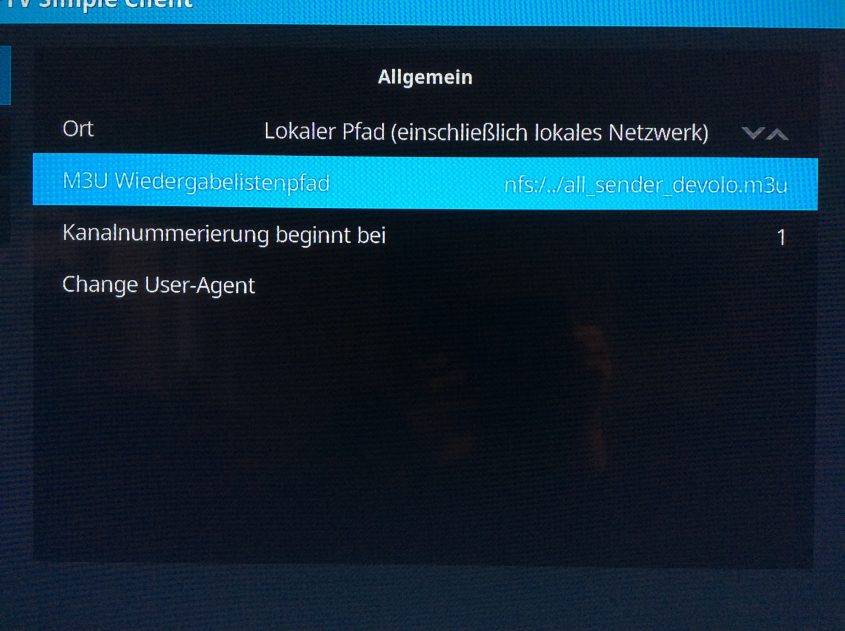
Konfigurasi PVR IPTV Simple Client untuk menggunakan M3U file yang saya sebutkan di atas.
Sebagai Remote control saya dapat menggunakan Kodi Remote App dengan iphone.
KODI on Pi3B
KODI on Pi3B
KODI on Pi3B
KODI on Pi3B
KODI on Pi3B
KODI on Pi3B
KODI on Pi3B
Setelah konfigurasi selesai maka KODI dapat saya pakai untuk menjadi SAT to IP reciever menggantikan Devolo SAT-IP Reciever yang tidak lagi berfungsi .
Lebih murah dan mempunyai lebih banyak fungsi dibandingkan dengan Devolo SAT-IP Reciever, saya juga dapat menikmati IP TV langsung dengan TV saya selain SAT to IP, dengan KODI. Serta menikmati Program TV lewat Apps dari sender tertentu.
Selain itu saya juga dapat menikmati Siaran Internet TV dari Sender yang ada di Indonesia secara langsung lewat Internet tanpa satelit.
sudo usermod -aG docker <run user for docker>
sudo usermod -aG docker pi
check apakah User dapat menggunakan docker:
id -a | grep docker
listing seperti ini harus tampil di konsole anda:
....., 995(docker), ......
Untuk mencoba apakah anda sekarang dapat menggunak kan docker , anda dapat mencoba untuk menampilkan semua process yang online di docker dengan komand ini :
docker ps -a
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
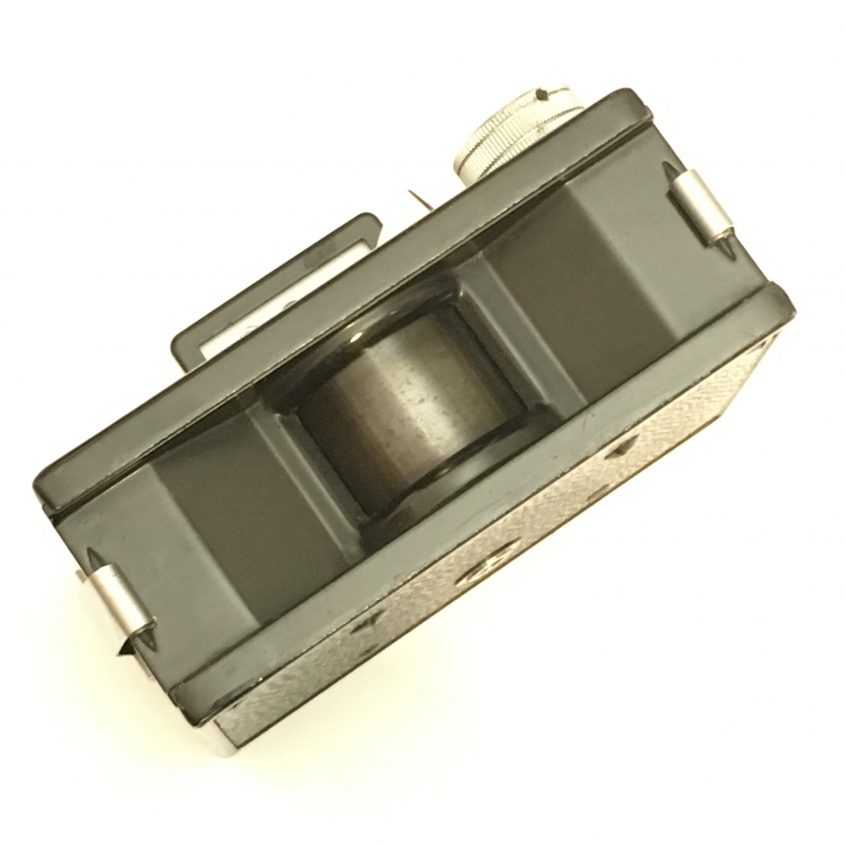
ini adalah modifikasi yang terakhir saya lakukan untuk menggunakan Exa Bellow Tessar 50mm/f2,8 saya dengan Zörk Mini Macro
Pada dasarnya Zörk Mini Macro bisa diadaptasikan ke semua kamera bajonet dengan T2 Mount, karena itu saya mengadaptasikan T-mount adapter saya dengan menambahkan dandelion chips sehingga dapat menggunakan langsung lensa Tersebut di Body Kamera Nikon untuk pemotretan Macro.
Zörk Mini Macro: (nikon F – M39)
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Perbandingan Mini Macro adapter dengan dan tanpa chips (di kiri dengan, di kanan tanpa):
(c) Andie Tanadi
Lensa: M42 Exa Bellow Tessar 50mm/f2,8 Jena DDR
Komponen yang dipakai (dari kiri ke kanan):
T2 adapter nikon F dengan dandelion chip
Zoerk Mini Makro Tubus dengan T2
M42 Tube
Lensa Tessar Below (Sunk Tessar) 50mm F2,8 , Carl Zeiss Jena DDR (M42), Rana dari F2,8 -F22, bisanya saya gunakan dengan rana 5,6 atau 8 untuk pemotretan macro dengan (D50/ D850)
seiring dengan keluarnya Raspberry pi4 8G , saya memigrasikan seluruh sistim development saya ke Raspbian 64 OS,
(c) andie tanadi
(c) andie tanadi
(c) andie tanadi
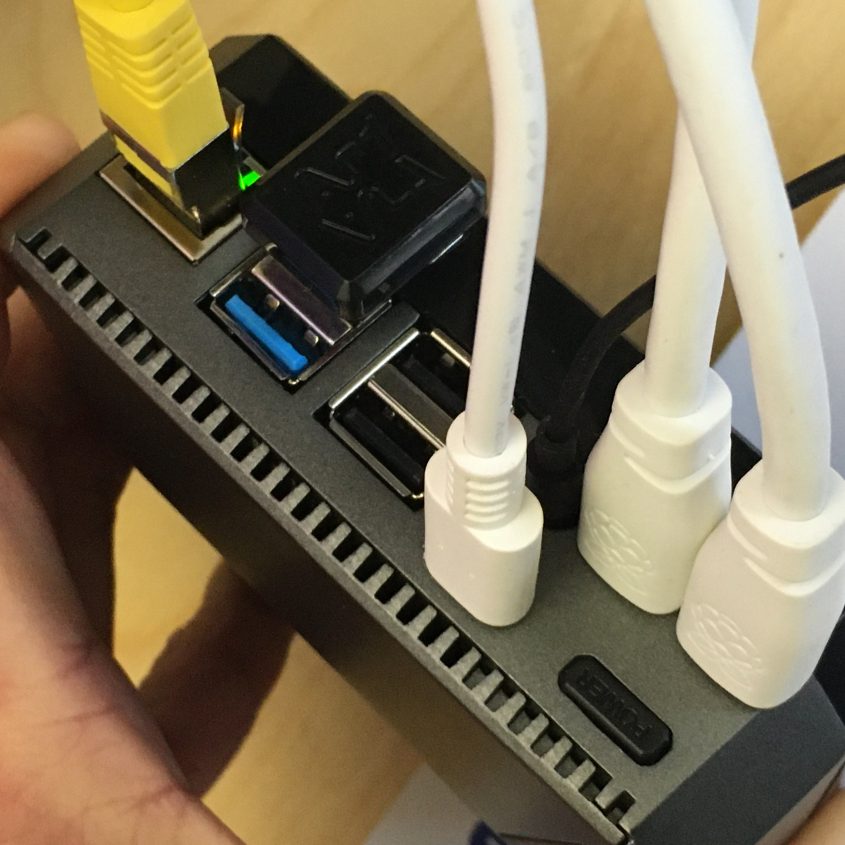
ini adalah hardware yang saya gunakan:
Raspberry Pi 4 Computer Modell B, 8GB RAM
Argon ONE M.2 Case für Raspberry Pi 4
Kingston M.2 SSD A400 240GB
Raspberry Pi USB-C Netzteil 5,1V / 3,0A, EU
Alasan saya memigrasikan dari SD card 64G ke SSD 240 adalah karena kebutuhan tempat untuk code saya, juga kecepatan boot dan operasi dari Pi yang saya pergunakan.
Referensi info untuk migrasi bisa anda lihat dengan detail di sini:
Exa Bellow Tessar 50mm/f2,8 adalah salah satu lensa macro yang terbaik, yang pernah dibuat oleh firma Exakta.
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Lensa ini terdapat dalam 2 model pertama dengan Exakta Bajonet (lens body chrom) dan , kedua dengan M42 Bayonet(lens body black).
Dengan rana mulai dari 2,8 sampai 22, yang menarik adalah jumlah daun rana yang lebih banyak(12 element) dari lensa macro jaman sekarang serta kontur rana yang bulat!. Ini membuat bokeh yang sangat baik untuk lensa yang relativ sudah lama diproduksi ini.
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
yang menarik adalah dengan solusi dandelion chipping tube, saya dapat menggunakan lensa ini di nikon DSLR saya (D50) .Lensa : M42 Exa Bellow Tessar 50mm/f2,8 Jena DDR
Dalam artikel ini saya ingin sedikit berbagi pengalaman saya dalam penerapan test automatisasi dengan Robotframework dalam bentuk pengujian bersyarat (Requirements based Testing)
Sebelum itu mari kita lihat dan pahami , apa arti Pengujian berbasis Persyaratan (Requirements based Testing) secara umum.
Apa itu Pengujian Berbasis Persyaratan? Pengujian berbasis persyaratan adalah pendekatan pengujian di mana kasus pengujian, kondisi, dan data berasal dari persyaratan. Ini termasuk tes fungsional dan juga atribut non-fungsional seperti kinerja, keandalan atau kegunaan.
Tahapan dalam Pengujian berdasarkan Persyaratan:
Menentukan Kriteria Penyelesaian Test :
Pengujian selesai hanya jika semua pengujian fungsional dan non-fungsional selesai.
Desain Kasus Uji: Kasus uji memiliki lima parameter yaitu:
keadaan awal atau prasyarat,
penyiapan data,
masukan,
hasil yang diharapkan,
hasil aktual.
Jalankan Test: Jalankan kasus uji terhadap sistem yang sedang diuji dan dokumentasikan hasilnya.
Verifikasi Hasil Test: Verifikasi apakah hasil yang diharapkan dan aktual cocok satu sama lain.
Verifikasi Cakupan Test: Periksa apakah pengujian mencakup aspek fungsional dan non-fungsional dari persyaratan.
Lacak dan kelola Kesalahan Software: Setiap Kesalahan yang terdeteksi selama proses pengujian melewati siklus hidup Kesalahan dan dilacak hingga penyelesaiannya. Statistik Kesalahan dipertahankan yang akan memberi kita status keseluruhan proyek.
Persyaratan Proses pengujian:
Pengujian harus dilakukan tepat waktu.
Proses pengujian harus menambah nilai siklus hidup perangkat lunak (software), oleh karena itu harus efektif.
Menguji sistem secara menyeluruh tidak mungkin dilakukan sehingga proses pengujian juga harus efisien.
Pengujian harus memberikan status keseluruhan proyek, oleh karena itu harus dapat dikelola. Dan biasanya untuk tujuan ini digunakan Test Management Tools (salah satu contohnya adalah Mantis / TestLink/ HP-ALM-Quality Center / Jira Plugin XRAY)
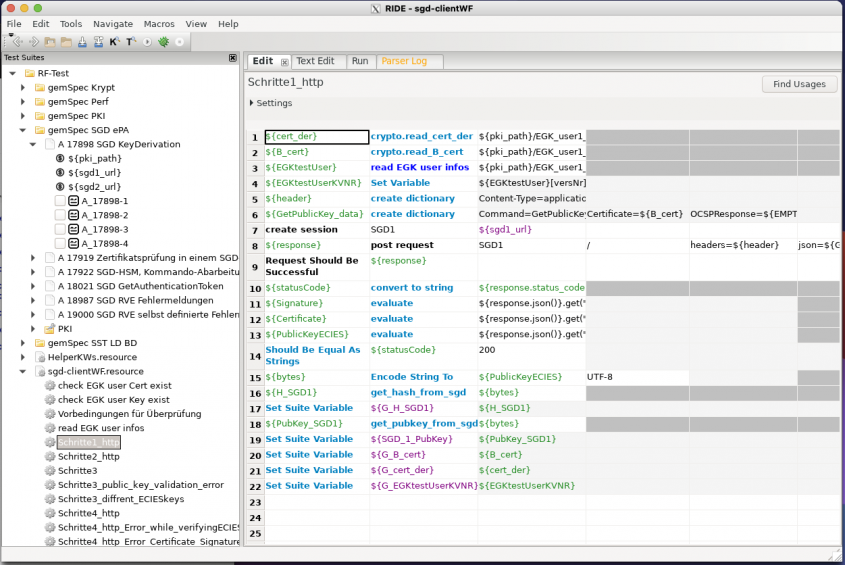
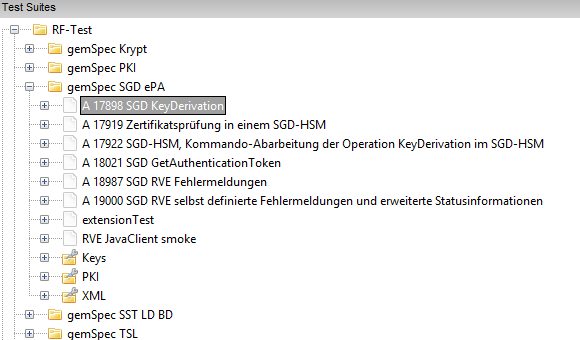
Contoh Desain Kasus Uji dengan Robotframework:
*** Settings ***
Documentation *Kriteria Penyelesaian Test:*
... Ein SGD ePA MUSS Folgendes sicherstellen: Wenn über dessen HTTPS-SGD-Schnittstelle (vgl. ) ein POST- Request mit dem Request-Body nach [gem_SGD_ePA#Tab_KeyDerivation-Request] eintrifft, so MUSS die RVE des SGD
... - das Zertifikat im Datenfeld *Certificate* gemäß TUC_PKI_018 prüfen und
... dabei Ergebnisse nach \ \ berücksichtigen.
...
... - die Kodierung und die Signatur der ""PublicKeyECIES"" prüfen (vgl. \ und ).
... Falls eine der Prüfungen ein nicht-positives Ergebnis liefert, so MUSS die RVE des SGD mit einer entsprechenden Fehlermeldung aus [gemSpec_SGD_ePA#] dem Client antworten und die weitere Requestverarbeitung abbrechen.
...
... Die RVE des SGD MUSS die Informationen aufbereiten und an das für den Request avisierte SGD-HSM übergeben (vgl.). Liefert das SGD-HSM ein OK, so MUSS die SGD die Antwort den HTTP-POST-Request mit folgender Nachricht beantworten:
... {
... \ ""Status"" : ""OK"",
... \ ""EncryptedMessage"" : ""... Base64-kodiertes Chiffrat. Das Chiffrat wurde vom SGD-HSM erzeugt ...""
... }
... Anderenfalls (SGD-HSM meldet einen Fehler) MUSS die RVE des SGD mit einer entsprechenden Fehlermeldung aus [gemSpec_SGD_ePA#] \ dem Client antworten.
*** Test Cases ***
A_17898-1
[Documentation] *Definisi Test:*
... - Am SGD ePA trifft über die HTTPS-SGD-Schnittstelle (vgl. A_17889) ein POST-Request mit dem Request-Body nach [gem_SGD_ePA#Tab_KeyDerivation-Request] ein: die RVE des SGD prüft das Zertifikat im - Datenfeld ""Certificate"" gemäß TUC_PKI_018 \ und berücksichtigt dabei Ergebnisse nach A_17896.
... - Die RVE des SGD prüft die Kodierung und die Signatur der ""PublicKeyECIES"" (vgl. A_17900 und A_17901).
...
... *Hasil Test:*
... - Beide Prüfungen liefern ein positives Ergebnis.
... - Die RVE des SGD bereitet die Informationen auf.
... - Die RVE des SGD übergibt die aufbereiteten Informationen an das für den Request avisierte SGD-HSM.
... - Das SGD-HSM liefert ein OK.
... - Die SGD beantwortet den HTTP-POST-Request mit folgender Nachricht:{\ ""Status"" : ""OK"",\ ""EncryptedMessage"" : ""... Base64-kodiertes Chiffrat. Das Chiffrat wurde vomSGD-HSM erzeugt ...""}"
[Tags] A_17898 gemSpec_SGD_ePA owner-at prio-1
[Setup] Enable Strict Validation
sgd-clientjavaWF.Vorbedingungen für Überprüfung
sgd-clientjavaWF.Schritt1
sgd-clientjavaWF.Schritt2
sgd-clientjavaWF.Schritt3
sgd-clientjavaWF.Schritt4
sgd-clientjavaWF.Schritt6
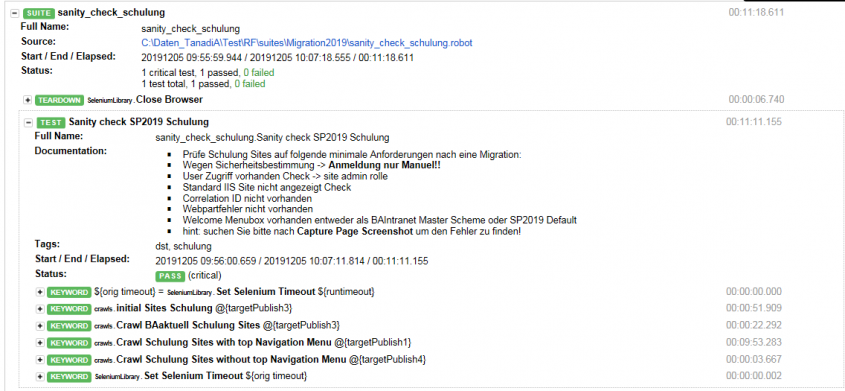
Kriteria Penyelesaian Test dapat anda implementasikan dalam fungsi [Documentation] pada Robotframework Test.
Verifikasi Cakupan Test dapat anda implementasikan dalam fungsi [Tags] pada Robotframework Test.
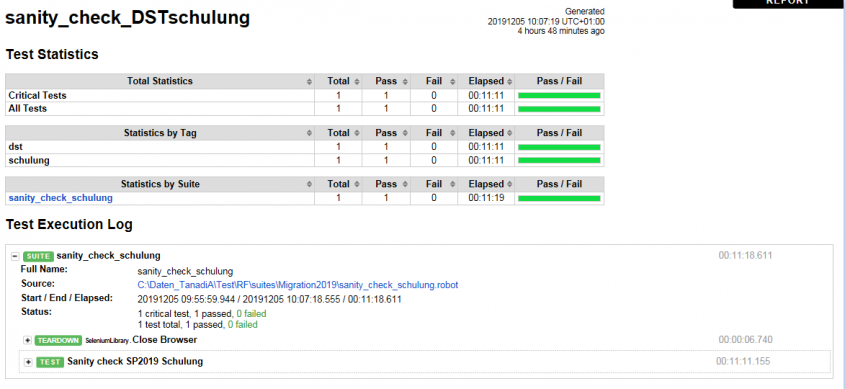
Verifikasi Hasil Cakupan Test akan dihasilkan oleh Robotframework Test Report dan Test Log, yang didalamnya menggambarkan jalur dan urutan Test anda.
Anda tidak membutuhkan Aplikasi atau Software extra untuk mengimplimentasikan Kriteria yang saya sebutkan di atas.
Hasil dan dokumentasi dari Test anda akan anda dapatkan selalu dari hasil akhir automatisasi Test anda dengan Robotframework.
Untuk anda yang tertarik untuk membeli chip ini silahkan menghubungi langsung Ebay seller ini
(c) andie tanadi
(c) andie tanadi
(c) andie tanadi
Seperti anda ketahui saya adalah kolektor beberapa kamera dan lensa analog Nikon. Seiring dengan perubahan waktu , saya mencari solusi untuk menggunakan lensa dan assesori Nikon saya di body Kamera DSLR saya (D50, D850).
Kalau anda menggunakan lensa AI, AIS , Bellow dan Macro Tube maka di display body kamera akan menunjukkan “F – -“ dan kamera tidak dapat mengambil foto, untuk “Profesional Level” model kamera nikon DSLR memiliki setting manual Lens dimana anda bisa memasukkan data focus length & rana terbesar lensa.
(c) andie tanadi
(c) andie tanadi
(c) andie tanadi
Kebanyakan lensa Nikkor AI, AIS tidak dapat berfungsi secara full di Body “Entry level” Model dari Nikon DSLR (contoh D50).
Sebenarnya ini adalah “Marketing Triks” Produser nikon untuk membatasi fungsi kamera terhadap lensa atau assesori tertentu untuk bisa dipakai dibody DSLR.
Solusi saya adalah memasang dandelion chip , sehingga body DSLR dapat di overide seolah olah mengetahui data maximal rana dan Focal length , sehingga bisa dipakai di entry Level DSRL (D50). Seperti jika anda menggunakan lensa Ais-P (45mm f/2.8 P, 500mm f/4 P dan 1200-1700mm f/5.6-8 P) ) atau seperti lensa-lensa dari Voigländer SLII dan Carl Zeiss ZF.2.
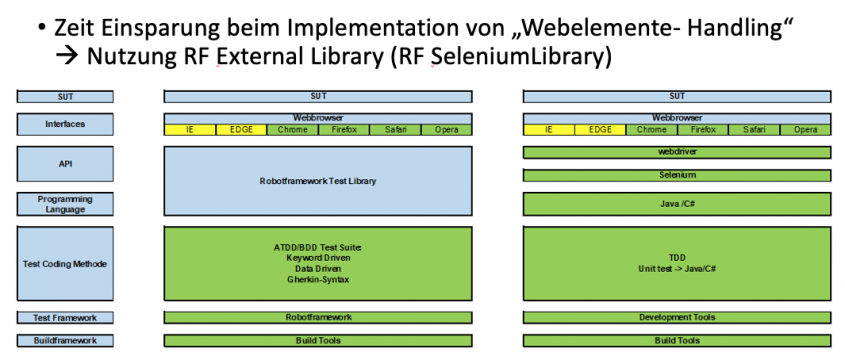
just one sample migrating ATDD Test from Coded UI to Robotframework.
Before Test Structure:
CodedUI Unit Test Structure
Comparison Unit Test & ATDD Test Structure:
Structure Comparison C# and Python with Selenium API
Reason for Migration from CodedUI to Robotframework:
CodedUI is now deprecated.
Test Tools and Ways of testing didn’t fullfill the requirement for doing ATDD test (E2E test) scopes.
Long test run .
Needs of proper test logging
Test run should be independance from SW build.
Only IE as browser is supported.
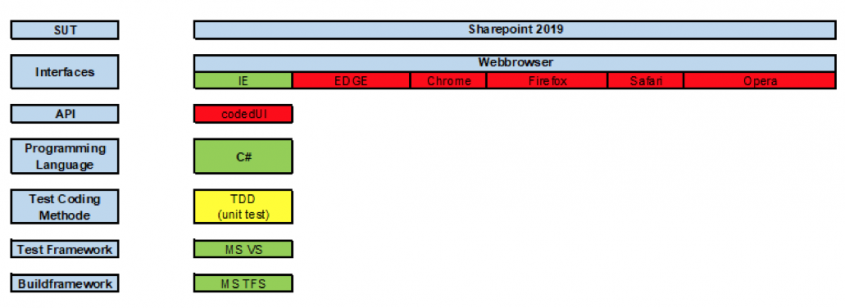
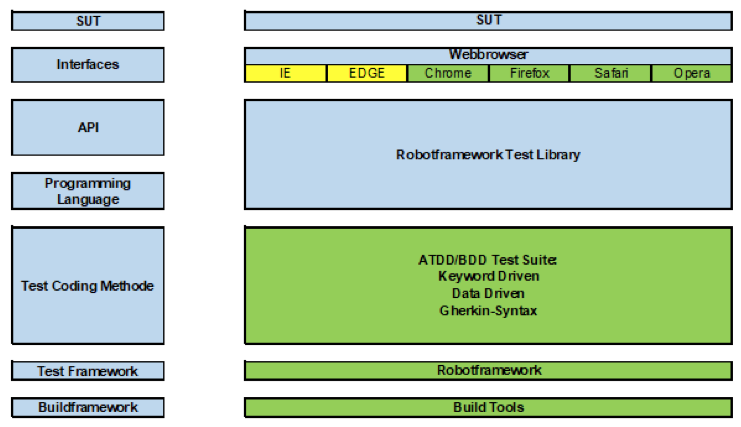
Proposed Robotframework ATDD Structure:
Robotframework ATDD Structure
Project / Test & Development enviroment Limitation:
Test Object: Sharepoint 2019 customisation
OS used for test object and testing: Microsoft Windows 10 OS
Build and test requrement tools: Microsoft TFS
Diffrent targets and build environment for: Development, Integration and Preproduction.
Needed Infrastukture and Software for Testing with Robotframework:
Python 3.x
Robotframework
Robotframework SeleniumLibrary
Robotframework Whitelibrary
Test editor Notepad ++ with Robotframework plugin
Test should be able to run as Selenium Hub trigger from MS TFS which consuming Robotframework xUnit reports as test run results.
Benefit of using Robotframework:
Test run faster than CodedUI
Test cases are written as Keyword Driven test, instead of Unit Test, these speed up the test cases creation and migration also simplify reusable of test cases.
No need using Visual Studio for creating test sases, you can use simple text editor r write tests.
Test results are more understandable for non-technical team members ( Test Manager, Project Manager, Environment Team, Solution Team)
Using RF Tag functionally and RF Report (Rebot) custom report can be created without any additional effort,
Report implementations of build on TFS over Xunit report flag on Robot runner.
Tests can run independently outside build tool.
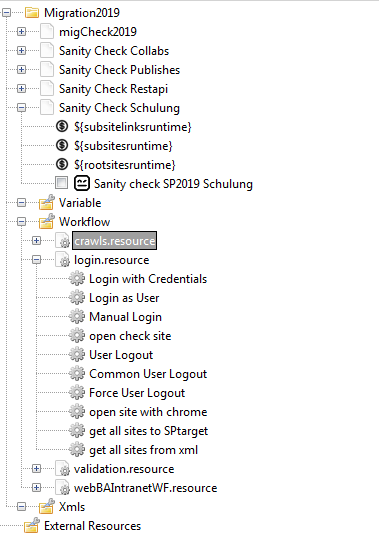
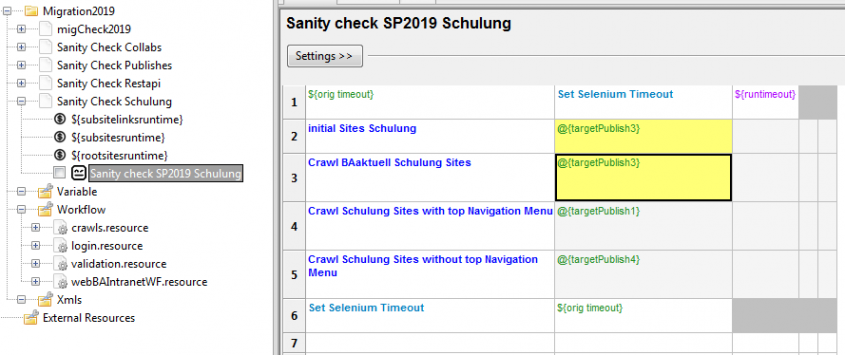
Starting the MIgration Steps:
Separating & creating all needed sharepoint UI keywords in UI Keyword resources.
Separating & creating all needed sharepoint 2019 application workflow as Keyword resources.
Creating template of sharepoint masterpage sites mapping as keyword resources.
Defining needed static and dynamic variables regarding to TCs and target test enviroment as variable resources
Creating RF runner files as batchfile for each target deployment enviroment (development, integration, or regresion)
Creating test suites regarding requirement (sanity test, fuctional test or regresion test)
Creating folder structure to map sharepoint functional requirement implementation
Creating folder structure for test reports, test suites and test runner.
Tagging related test suites regarding requirement coverage
Verify nothing is wrong. Verify no errors are reported after each command. Fix as required (you’re on your own here!).
dpkg -C
apt-mark showhold
Optionally upgrade the firmware.
sudo rpi-update
Prepare apt-get
Update the sources to apt-get. This replaces “stretch” with “buster” in the repository locations giving apt-get access to the new version’s binaries.
sudo sed -i 's/stretch/buster/g’ /etc/apt/sources.list
sudo sed -i 's/stretch/buster/g’ /etc/apt/sources.list.d/raspi.list
Verify this caught them all. Run the following, expecting no output. If the command returns anything having previously run the sed commands above, it means more files may need tweaking. Run the sed command for each.
grep -lnr stretch /etc/apt
Speed up subsequent steps by removing the list change package.
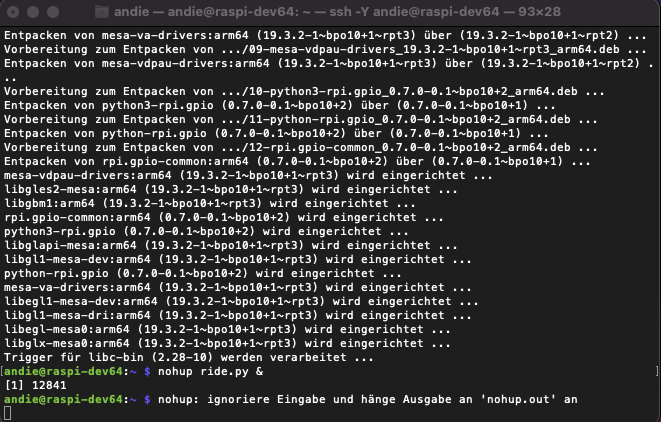
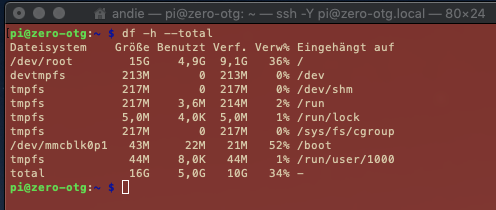
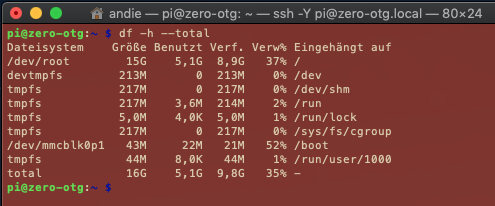
Raspberry Zero W connected directly to Mac with OTG mode
Why using Robotframework on Raspberry pi?
As Raspberry pi user , sometimes I have problems after doing OS update with some application I currently workout on pi, mean do “sudo apt-get update” , “sudo apt-get upgrade” & do “Reboot” everythings goes Wrong 🙁 !.
I have been using Robotframework since 2006, and would like to show you how simple to run a Regresion Test with Robotframework Framework on SBC like Rasberry Pi and Co’s. Robotframe work need only python ecosystem, which are out of the box delivered by Raspbian OS. And also it needs minimal resource of space in SD card.
Used pi space before Robotframework Installation
As a sample I will start with installation of Robotframework , please check before if you have python pip installer installed on your Rasbian before starting with the installation!
Pada dasarnya panorama kamera terbagi dalam 3 jenis:
kamera Kamera konvensional dimana Format lensa yang dipakai lebih besar dari pada besar film format . Contohnya: Fuji 6X17 , Linhof Teknorama , VPan, atau kamera yang terbaru dari Hasselblad VPan dengan format film 24X68 mm
Kamera dengan lensa yang berputar pada sumbu tertentu . contohnya : Horizon 202, Noblex atau Widelux.
Terakhir adalah Slitze Kamera dimana dengan kombinasi perputaran film dan celah cahaya pada proses pemotretan terbentuk panorama foto.Contohnya Roundshot, atau AlfaRotor -kamera
Kamera yang akan saya bahas di sini adalah beberapa kamera yang saya pernah miliki dan juga pergunakan untuk memotret ,tentunya pendapat tentang kelemahan serta kelebihan panorama kamera tersebut merupakan pendapat saya pribadi yang kadang kala mungkin tidak sama dengan rekan penggemar fotografi yang lain.
FT 2
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Kelebihan :
Film format : 24 X 120 mm
Jenis kamera : panorama dengan sumbu berputar
lensa 50mm
Sudut pemotretan: 130 derajat
Kecepatan rana : 1/100, 1/200, 1/400 sec
Diagfragmm : 5.0
Film format yang lebih panjang dari pada kamera yang lainnya.
Kamera ini dibuat sangat sederhana sehingga mudah di perbaiki sendiri Kamera ini tidak memerlukan batteri alias “kamera manual”
Kekurangan :
Film yang dipergunakan film 135 biasa tetapi harus di gulung khusus dalam roll yang tersedia pada kamera, tanpa roll ini kamera ini tidak dapat dipakai untuk memotret.
Pembatasan pada kecepatan pencahayaan kadang kala sangat mengganggu dalam pangambilan gambar, pada umumnya saya memakai film asa 100-200 Karena format film yang tidak lazim.
Film yang di hasilkan hanya dapat di cetak sendiri atau di labor foto tertentu saja.
Kamera ini meskipun lebih murah dari kamera yang lainnya ,tetapi sangat jarang di temui di pasaran karena sudah tidak di produksi lagi.
Dapat menggunakan Flash, Flashsyncron sampai 1s – 1/500 s
Menggunakan film biasa
Tidak membutuhkan Battery
Kekurangan :
Harga yang mahal . (pesanan Khusus yang dibuat spesial hanya di produksi 10 Kamera, kamera saya adalah kamera ke 8 yang dibuat.)
Waterpas yang relatif kecil sehingga sangat sulit untuk mengatur horison kamera.
Noblex 135s
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Film format : 24 X 66 mm
Jenis kamera : panorama dengan sumbu berputar
lensa 29 mm
Sudut pemotretan: 136 derajat
Kecepatan rana : 1/30,1/60,1/125, 1/250, 1/500 sec Diagfragmm : 4,5-16
Kelebihan :
Satu-satunya kamera yang mempunyai kecepatan rana 1/500 sec sehingga dapat dipakai untuk memotret benda atau moment yang cepat bergerak.
Mempunyai kemampuan multi exposing ,sehingga anda dapat mencahayai negatif yang sama berkali-kali.Kemampuan ini sangat berguna bila anda perlu memotret dengan pencahayaan yang lebih lama dari 1/30sec
Sangat mudah untuk memasukkan film Lensa Tessar dari kamera ini sangat tajam sekali ,sehingga anda dapat memakai diagfragma 4,5 tanpa khawatir akan kwalitas gambar anda.
Kemampuan pada model S dan U untuk menkoreksi perspektif. sejauh 4mm Sangat mudah untuk dipakai
Kekurangan :
Harga yang mahal .
Membutuhkan batteri sebagai sumber tenaga.
Waterpas yang relatif kecil sehingga sangat sulit untuk mengatur horison kamera.
Tombol pengaturan rana yang sangat kecil sehingga ,kadang kala menyakitkan pemakai, tidak bisa terhitung berapa kali saya harus memutuskan kuku jari tangan saya dalam menggunakan kamera ini.
Munculnya Docker memicu ledakan popularitas kontainer. Sejak itu, semakin banyak alat dan standar yang dirancang untuk membantu mengatur penggunaan teknologi ini.
Sayangnya, cukup sulit untuk mengikuti perkembangan. “Pertempuran” antara perusahaan teknologi besar juga membingungkan bagi banyak dari kita.
Dalam
artikel ini, saya akan membahas semua nama besar yang pernah Anda
dengar dan mencoba menguraikan jargon teknis untuk Anda dan menjelaskan
bagaimana ekosistem kontainer akan bekerja sama pada tahun 2021.
Dan jika Anda berpikir bahwa Anda adalah satu-satunya yang tidak mengerti semua ini, jangan khawatir … Anda tidak sendirian!
Pahami Docker
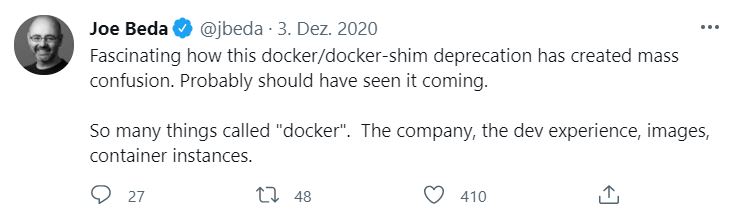
Ada perbedaan antara Docker (dalam bentuk perusahaan), Docker-Containern, Docker-Images, dan Development Tools Docker yang biasa kita gunakan:
Seperti yang Anda lihat, Anda bukan satu-satunya yang bingung. Joe Beda , co-developer Kubernetes, setuju.
Ini
adalah kesempatan sempurna untuk menjernihkan beberapa kebingungan dan
membantu Anda memahami kapan itu Docker, containerd, atau CRI-O. Ini sangat penting jika Anda ingin membahas topik Kubernetes.
Penting bagi Anda untuk mengingat hal-hal berikut:
Wadah tidak lagi dikaitkan secara permanen dengan nama Docker. Ada beberapa alat kontainer yang tersedia. Docker adalah salah satunya, dan Docker (perusahaan) mendukung beberapa tetapi tidak semuanya.
Jika Anda masih berpikir bahwa container hanyalah Dockers, baca terus! Sekarang kita akan melihat lebih dekat pada ekosistem kontainer.
Garis besar ekosistem kontainer
Ekosistem kontainer terdiri dari banyak teknologi, istilah khusus, dan perusahaan pesaing. Untungnya, perusahaan terkadang menegosiasikan gencatan senjata yang rapuh untuk menyepakati standar tertentu.
Standar
ini membantu untuk mencapai interoperabilitas antara alat yang berbeda
dan menghindari ketergantungan pada perusahaan atau proyek tertentu
(teknologi). Standar dasar yang harus diikuti:
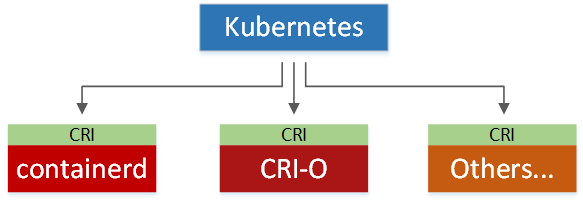
Container Runtime Interface (CRI) mendefinisikan API antara Kubernetes dan Container Runtime.
Open Container Initiative (OCI) mendefinisikan standar untuk image dan container.
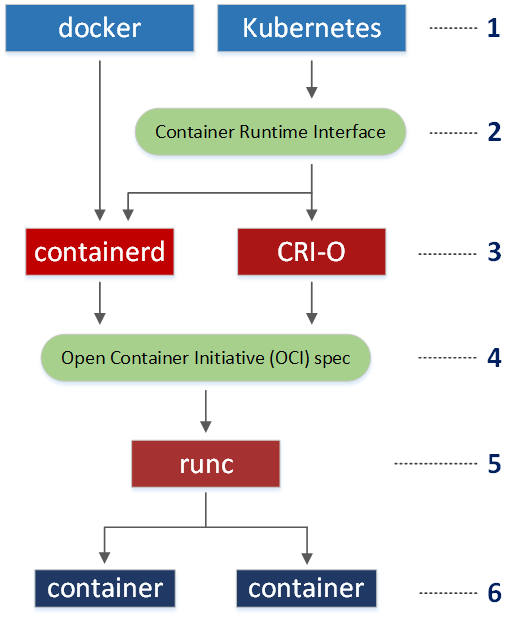
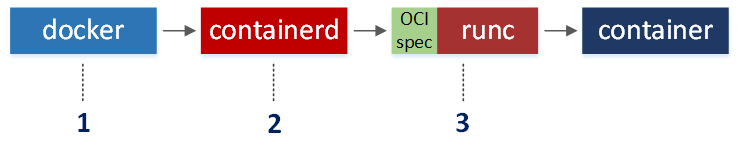
Diagram di bawah menunjukkan bagaimana Docker , Kubernetes , CRI , OCI , containerd dan runc cocok bersama dalam ekosistem ini:
Penjelasan Hubungan antara docker, CRI-O, containerd und runc Sumber Informasi: www.tutorialworks.com
Ini adalah alat yang digunakan untuk menjalankan kontainer dalam pengembangan atau produksi.
CRI ( Container Runtime Interface) adalah Kubernetes API (Application Programming Interface). CRI mendefinisikan cara Kubernetes berinteraksi dengan runtime container yang berbeda. Karena standar dalam spesifikasi, Anda dapat memilih implementasi CRI mana yang ingin Anda gunakan atau mungkin Anda tulis sendiri.
Anda dapat memilih sendiri runtime yang sesuai dengan spesifikasi Container Runtime Interface (CRI). containerd dikembangkan oleh Docker. Plug-in CRI adalah plug-in yang terintegrasi secara bawaan dalam containerd dan diaktifkan secara default (dari versi 1.1). Ini memungkinkan Anda untuk menjalankan Kubernetes dengan containerd sebagai runtime container. CRI-O adalah proyek open source dan alternatif untuk containerd dan didukung oleh sejumlah perusahaan terkenal.
OCI adalah spesifikasi standar industri terbuka yang berisi dua spesifikasi: spesifikasi runtime (runtime-spec) dan spesifikasi gambar (image-spec)
runC adalah alat yang sesuai dengan OCI untuk membuat dan menjalankan container. runc digunakan untuk membuat dan menjalankan container sesuai dengan spesifikasi OCI.
sumber info: https://www.kreyman.de/index.php/others/linux-kubernetes/232-unterschiede-zwischen-docker-containerd-cri-o-und-runc
Docker
Kami akan mulai dengan Docker karena ini adalah alat kontainer paling populer saat ini. Bagi banyak orang, nama “Docker” sendiri merupakan sinonim dari kata “container”.
Docker memulai seluruh revolusi containerisasi ini. Docker
telah menciptakan alat yang sangat ergonomis dan mudah digunakan untuk
bekerja dengan container, yang juga disebut Docker.
Proyek untuk mengoperasikan wadah dengan Docker Sumber: www.tutorialworks.com
Administrasi dari Pengguna / administrator dan memulai container dengan CLI Docker.
containerd menggunakan image, mengelola jaringan dan penyimpanan, dan menggunakan runc untuk menjalankan container
runc menangani Low Level “Stab” process untuk membuat dan menjalankan proses container
docker dapat diinstal pada sistem operasi klien atau pada sistem operasi server. docker berisi sejumlah alat yang menyederhanakan pekerjaan pengembang dan insinyur DevOps. Dengan CLI buruh pelabuhan Anda dapat membuat image container, mengambilnya dari repositori, membuat container, memulai dan mengelolanya.
Docker terdiri dari tiga proyek:
docker-cli – adalah utilitas baris perintah yangberinteraksidengan Anda menggunakan perintah docker .
containerd – adalah daemon Linux yang mengelola dan memulai container. Ini mengunduh gambar dari repositori, mengelola penyimpanan dan jaringan, dan memantau eksekusi kontainer.
Runc – adalah runtime container tingkat rendah yang benar-benar membuat container dan menjalankan. Ini termasuk libcontainer , implementasi berbasis Go asli untuk membuat container.
Saat Anda menjalankan wadah dengan docker , Anda sebenarnya menjalankannya dari daemon docker, containerd, dan kemudian runc .
Dockershim: Docker di Kubernetes
Penting untuk dicatat bahwa Kubernetes hanya dapat melayani runtime container yang mendukung Container Runtime Interface (CRI). Namun, Docker tidak dapat secara langsung mendukung standar ini. Oleh karena itu, Kubernetes menyertakan komponen yang disebut dockershim, yang diperlukan untuk bekerja dengan Docker.
Di masa mendatang (dari versi 1.23) Kubernetes akan menghentikan dukungan untuk Dockershim dan juga Docker dan hanya akan bekerja dengan Container Runtime s yang mendukung Container Runtime Interface (CRI) – containerd atau CRI-O . ( FAQ Penghentian Dockershim )
Namun, ini tidak berarti bahwa Kubernetes tidak akan dapat menjalankan container berformat Docker. Baik containerd maupun CRI-O dapat menjalankan gambar berformat Docker (berformat OCI). Anda tinggal melakukannya tanpa harus menggunakan perintah docker atau daemon Docker.
Shim
– Secara teknis, shim adalah komponen dalam sistem perangkat lunak yang
bertindak sebagai jembatan antara berbagai API atau sebagai lapisan
kompatibilitas. Terkadang shim ditambahkan saat Anda ingin menggunakan komponen pihak ketiga. Anda membutuhkan sedikit kode lem untuk membuatnya bekerja.
Docker-Images
Apa yang disebut banyak orang sebagai Docker Image sebenarnya adalah Image yang dikemas dalam format Open Container Initiative (OCI) .
Jika Anda ingin mengunduh gambar dari Docker Hub atau repositori lain, Anda dapat melakukannya dengan perintah buruh pelabuhan atau dengan utilitas podman, atau dengan alat lain yang mendukung spesifikasi format gambar OCI.
Container Runtime Interface (CRI)
CRI adalah API yang digunakan Kubernetes untuk mengontrol berbagai runtime container untuk membuat dan mengelola container.
CRI menyederhanakan penggunaan runtime container yang berbeda untuk Kubernetes (atau lebih tepatnya kubelet ). Alih-alih mendukung setiap kemungkinan runtime container secara terpisah, hanya standar CRI yang didukung yang digunakan. Dalam hal ini, tugas manajemen kontainer sepenuhnya terletak pada runtime kontainer.
Sumber: www.tutorialworks.com
Jadi, jika Anda lebih suka menggunakan containerd untuk menjalankan container Anda, jangan ragu untuk melakukannya. Atau, jika Anda lebih suka menggunakan CRI-O maka Anda dapat menggunakan ini dengan aman. Ini karena spesifikasi CRI diimplementasikan di kedua runtime.
Sebagian besar waktu, jika Anda adalah pengguna akhir, bagaimana Anda mengimplementasikannya tidak menjadi masalah. Implementasi CRI dirancang agar dapat dipasang dan diubah dengan mulus.
Untuk informasi Anda: Red Hat (proyek OpenShift) menggunakan CRI-O dan bertanggung jawab atas pemeliharaannya (keamanan, perbaikan bug, dll.). Sementara containerd terus dibungkus oleh Docker.
Runtime container mana yang digunakan di Kubernetes?
The kubelet (sebuah berjalan agen pada setiap node) bertanggung jawab untuk berinteraksi dengan runtime wadah dalam arsitektur Kubernetes. Tugas utama kubelet adalah mengirimkan instruksi start/stop ke runtime container.
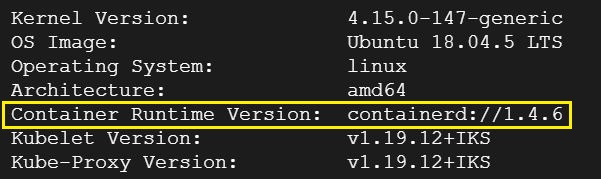
Opsi berikut digunakan untuk mengonfigurasi runtime container: –container-runtime dan –container-runtime-endpoint. Anda
dapat mengetahui Container Runtime mana yang sudah terinstal di
infrastruktur Kubernetes Anda menggunakan rantai perintah berikut:
kubectl mendeskripsikan simpul <node_name>
sumber info: https://www.kreyman.de/index.php/others/linux-kubernetes/232-unterschiede-zwischen-docker-containerd-cri-o-und-runc
containerd
containerd adalah runtime container tingkat tinggi yang berasal dari Docker dan mengimplementasikan spesifikasi CRI. ontainerd
menarik gambar dari repositori, mengelolanya dan kemudian meneruskannya
ke runtime bawahan, yang benar-benar membuat dan menjalankan proses
kontainer.
containerd telah dihapus dari proyek Docker untuk membuat Docker lebih modular. Jadi Docker menggunakan containerd untuk dirinya sendiri.Saat Anda menginstal Docker, containerd juga diinstal secara otomatis. Selain itu, ontainerd menggunakan pluginnya sendiri untuk mendukung CRI di Kubernetes.
CRI-O
CRI-O adalah runtime container tingkat tinggi lainnya yang mengimplementasikan Container Runtime Interface (CRI). CRI-O adalah alternatif untuk containerd dan bekerja dengan cara yang sama.
CRI-O dikembangkan dengan dukungan Red Hat, IBM, Intel dan SUSE sebagai wadah runtime untuk Kubernetes. CRI-O menawarkan kemungkinan untuk memulai, menghentikan, atau memulai ulang container, sama seperti containerd.
Inisiatif Kontainer Terbuka (OCI)
OCI adalah sekelompok perusahaan teknologi yang mempertahankan spesifikasi untuk format gambar kontainer dan eksekusi kontainer.
Gagasan di balik OCI adalah Anda dapat memilih di antara berbagai runtime yang sesuai dengan spesifikasi. Masing-masing runtime ini memiliki sub-implementasi yang berbeda.
Misalnya, Anda memiliki satu runtime yang kompatibel dengan OCI untuk host Linux Anda dan satu untuk host Windows Anda. Ini adalah keuntungan memiliki standar yang dapat diterapkan oleh banyak proyek yang berbeda.
runc
runc adalah runtime kontainer yang kompatibel dengan OCI. Ini mengimplementasikan spesifikasi OCI dan menjalankan proses container.
runc disebut sebagai implementasi referensi OCI.
Apa itu implementasi referensi?
Implementasi referensi adalah perangkat lunak yang telah mengimplementasikan semua persyaratan spesifikasi atau standar. Biasanya software pertama yang dikembangkan dari spesifikasinya. Dalam kasus OCI, runc menawarkan semua
fungsi yang diharapkan dari runtime yang sesuai dengan OCI, meskipun
setiap orang dapat mengimplementasikan runtime OCI mereka sendiri jika
mereka mau.
runc
menawarkan semua fungsi tingkat rendah untuk wadah dan berinteraksi
dengan fitur Linux tingkat rendah yang ada seperti ruang nama dan grup
kontrol. runc menggunakan fungsi-fungsi ini untuk membuat dan menjalankan proses container.
Ada juga beberapa alternatif untuk runc :
crun adalah runtime kontainer yang ditulisdalam C (sebaliknya, runc ada di Go )
kata-Runtime berasal dari proyek Katacontainers , yang mengimplementasikan spesifikasi OCI sebagai VM ringan individual (virtualisasi perangkat keras)
gVisor berasal dari Google dan dapat membuat wadah dengan kernelnya sendiri. Ini mengimplementasikan OCI dalam runtime-nya yang disebut runc .
Kesimpulan
Dalam artikel ini kita melihat bahwa Docker hanyalah sebagian kecil dari keseluruhan ekosistem container. Ada standar terbuka: CRI dan OCI serta proyek seperti containerd , runc dan CRI-O . Kami akan segera melihat banyak implementasi baru dari runtime container dengan dukungan untuk standar CRI dan OCI.
Semoga artikel ini bisa memberi sedikit pencerahan tentang gelapnya dunia container.
Kebanyakan alat IOT device atau sensor , mempunyai Interface dengan Android, tapi jarang sekali yang out off the box mempunyai implementasi untuk dipakai dengan Apple Home,
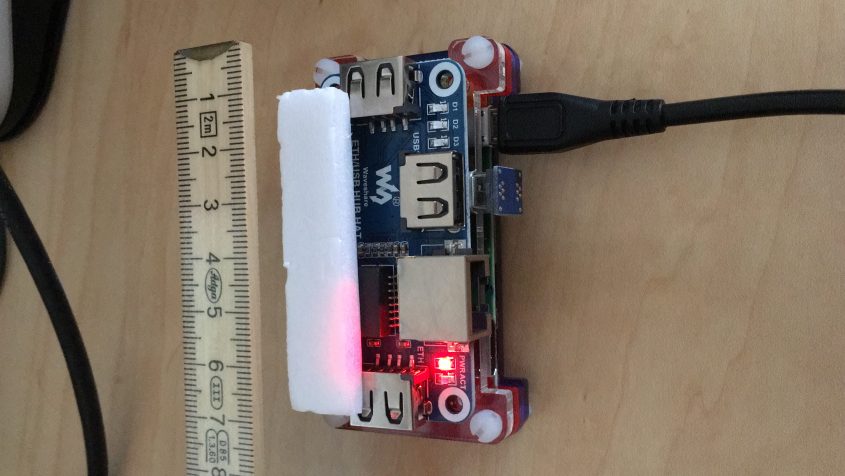
Dengan menggunakan Pi Zero W sebagai Homebridge Server anda dapat menhubungkan IoT devices anda dengan Apple Home sehingga, data data sensor dan Applikasi hardware anda bisa difungsikan lewat siri, yang anda perlukan hanyalah menciptakan konfigurasi Homebride yang cocok untuk IoT device anda dan memakai atau mengimplementasikan Homebridge plugin yang cocok untuk IoT device anda!
Hardware untuk IOT:
raspberry zero WH
DS1820 temperature sensor
IPHONE/IPAD
HomePod
Fritz Router
TP-Link HS110 Switch
Pi Camera 8MP ver2.1
Philips HUE HUb
Lampu Philips HUE
Eve heater
Software :
NodeJs
homebridge & needed plugin
onewire scripts
Weekend projekt ini hanya perlu waktu 2 Jam untuk implementasi
Dengan Plugin untuk Homebridge saya sudah menghubungkan PiCamera, One Wire Temperatur Sensor, Lampu Philips HUE , EVE heater switch , serta TP-Link Switch HS110 sehingga bisa digunakan dengan siri.
Hardware yang anda perlukan:
Shelly PM1
Pi Zero WH
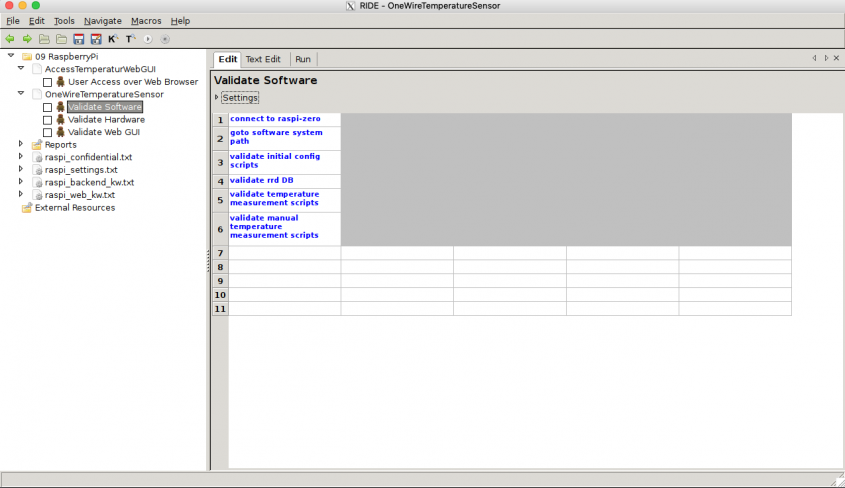
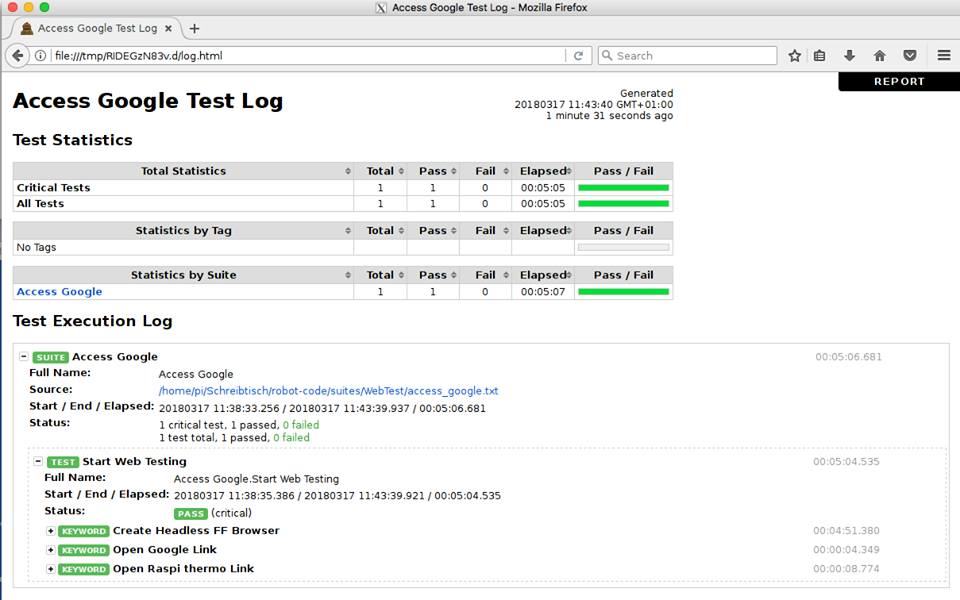
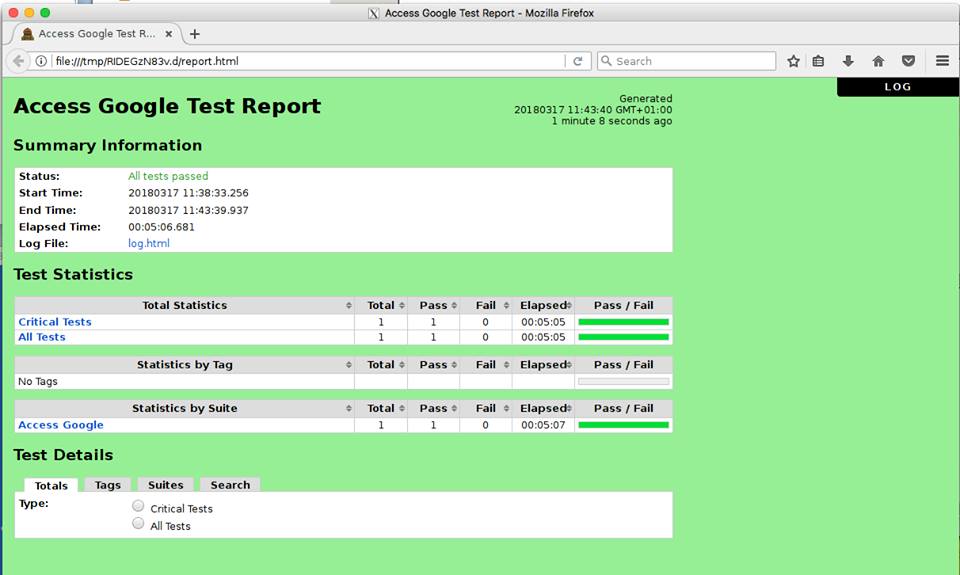
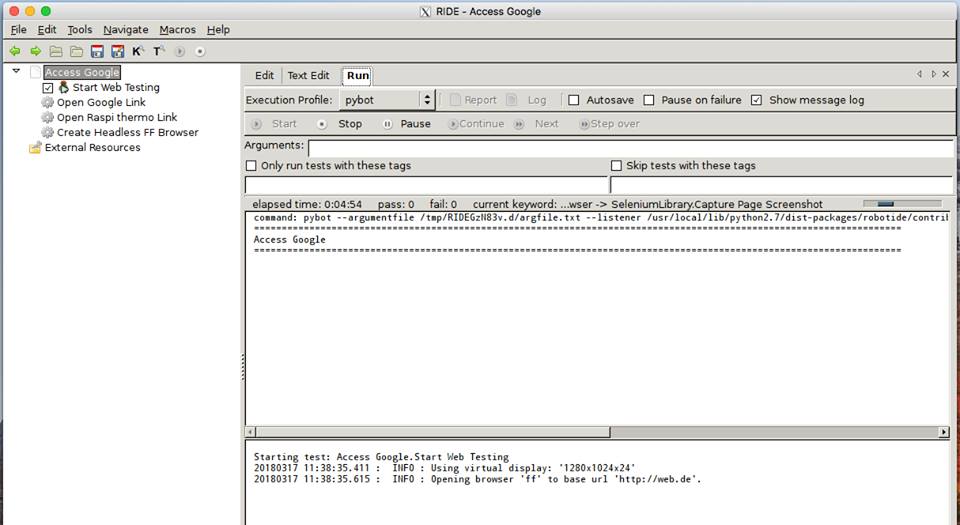
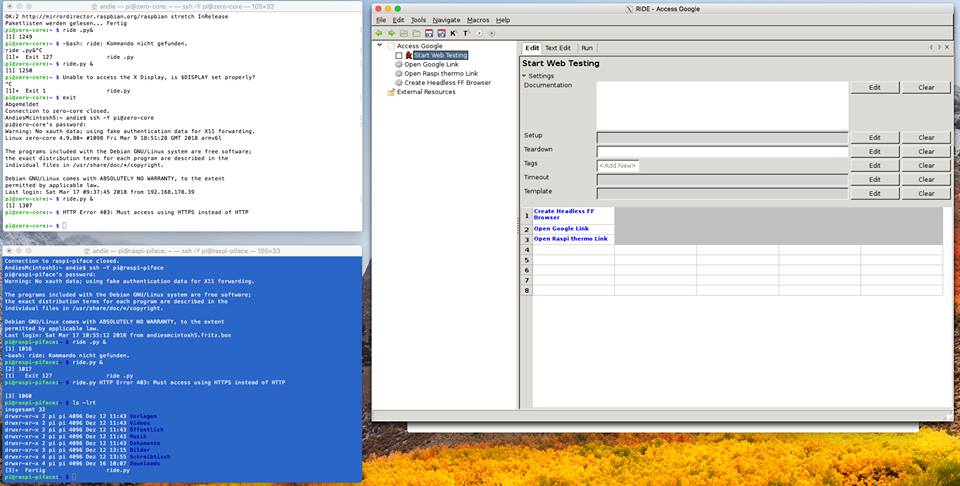
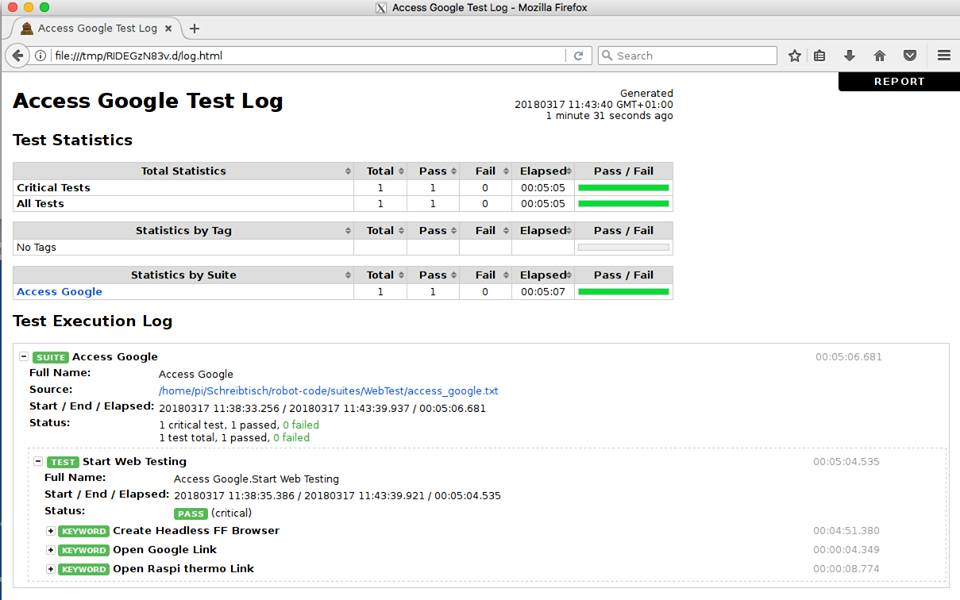
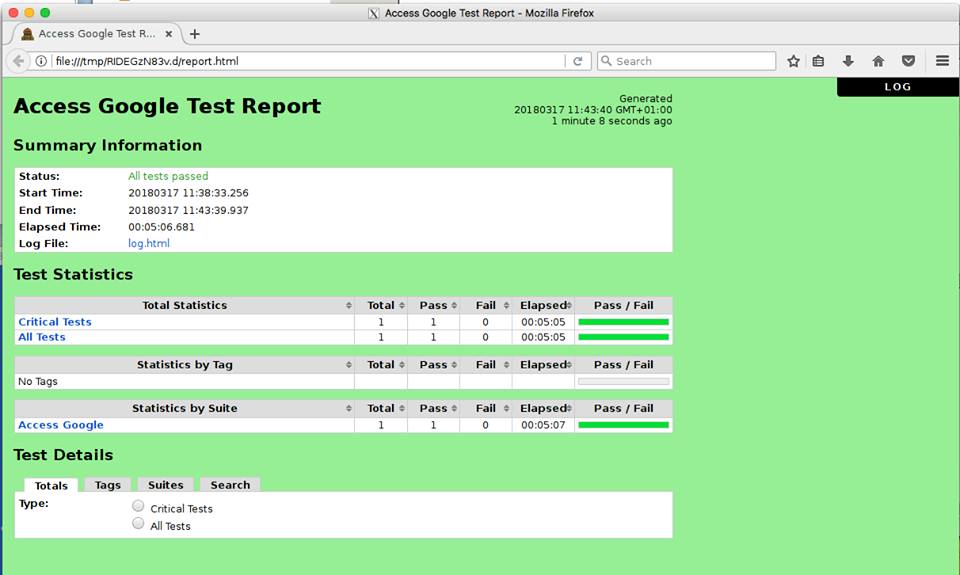
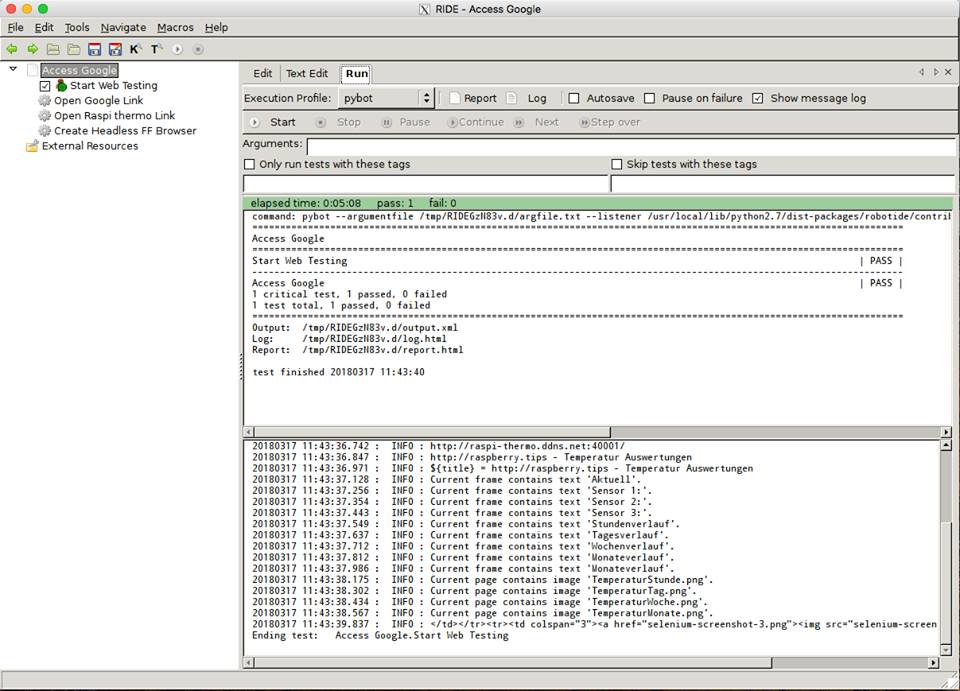
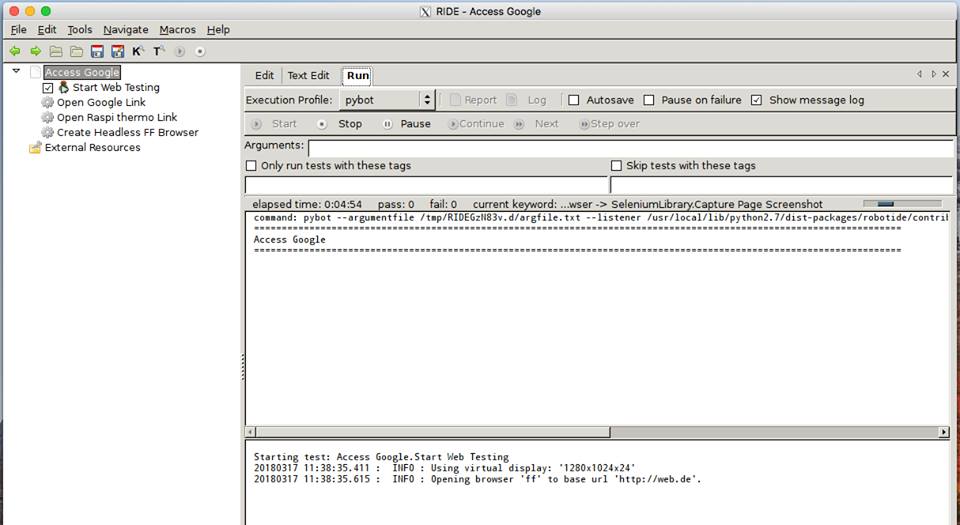
Regresion Test Tools:
Ride sebagai Test Case Tools
Hasil Test dalam bentuk HTM(xml)
Robotframework dapat di gunakan untuk berbagai OS and Hardware (Wins, Mac, Linux, Unix)!
Untuk Test Regresion saya menggunakan Robotframework dengan Zero Pi dengan plugin yang dibutuhkan.Koneksi ke zero sebagai hub untuk Apple Home lewat SSH terminal.