ini adalah modifikasi yang terakhir saya lakukan untuk menggunakan Exa Bellow Tessar 50mm/f2,8 saya dengan Zörk Mini Macro
Pada dasarnya Zörk Mini Macro bisa diadaptasikan ke semua kamera bajonet dengan T2 Mount, karena itu saya mengadaptasikan T-mount adapter saya dengan menambahkan dandelion chips sehingga dapat menggunakan langsung lensa Tersebut di Body Kamera Nikon untuk pemotretan Macro.
Zörk Mini Macro: (nikon F – M39)
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Perbandingan Mini Macro adapter dengan dan tanpa chips (di kiri dengan, di kanan tanpa):
(c) Andie Tanadi
Lensa: M42 Exa Bellow Tessar 50mm/f2,8 Jena DDR
Komponen yang dipakai (dari kiri ke kanan):
T2 adapter nikon F dengan dandelion chip
Zoerk Mini Makro Tubus dengan T2
M42 Tube
Lensa Tessar Below (Sunk Tessar) 50mm F2,8 , Carl Zeiss Jena DDR (M42), Rana dari F2,8 -F22, bisanya saya gunakan dengan rana 5,6 atau 8 untuk pemotretan macro dengan (D50/ D850)
seiring dengan keluarnya Raspberry pi4 8G , saya memigrasikan seluruh sistim development saya ke Raspbian 64 OS,
(c) andie tanadi
(c) andie tanadi
(c) andie tanadi
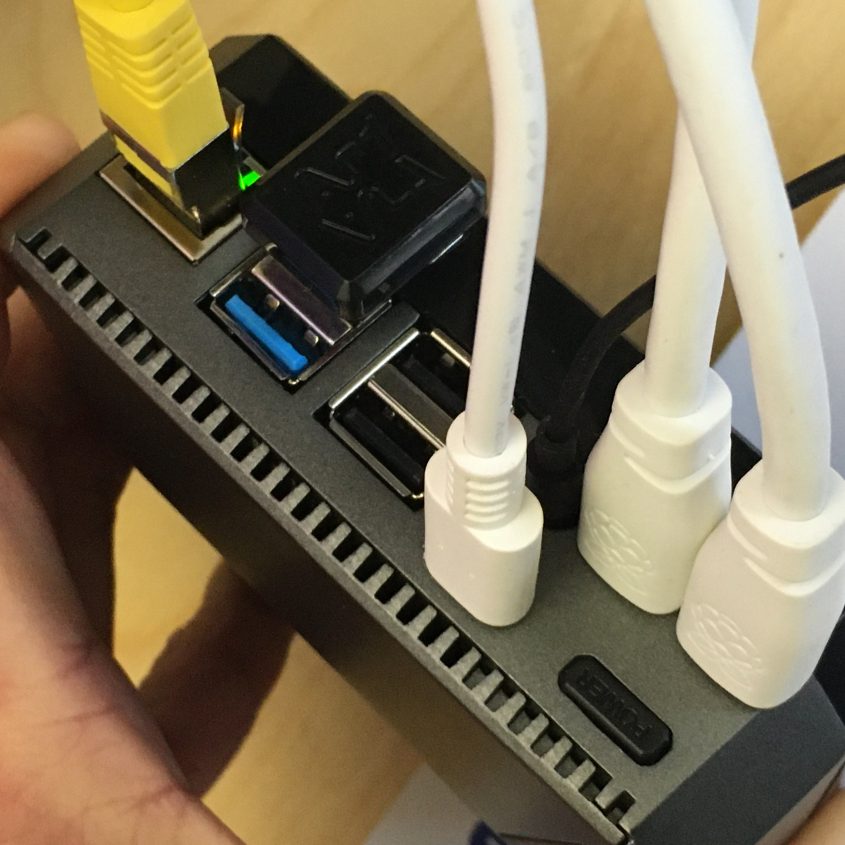
ini adalah hardware yang saya gunakan:
Raspberry Pi 4 Computer Modell B, 8GB RAM
Argon ONE M.2 Case für Raspberry Pi 4
Kingston M.2 SSD A400 240GB
Raspberry Pi USB-C Netzteil 5,1V / 3,0A, EU
Alasan saya memigrasikan dari SD card 64G ke SSD 240 adalah karena kebutuhan tempat untuk code saya, juga kecepatan boot dan operasi dari Pi yang saya pergunakan.
Referensi info untuk migrasi bisa anda lihat dengan detail di sini:
Exa Bellow Tessar 50mm/f2,8 adalah salah satu lensa macro yang terbaik, yang pernah dibuat oleh firma Exakta.
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
Lensa ini terdapat dalam 2 model pertama dengan Exakta Bajonet (lens body chrom) dan , kedua dengan M42 Bayonet(lens body black).
Dengan rana mulai dari 2,8 sampai 22, yang menarik adalah jumlah daun rana yang lebih banyak(12 element) dari lensa macro jaman sekarang serta kontur rana yang bulat!. Ini membuat bokeh yang sangat baik untuk lensa yang relativ sudah lama diproduksi ini.
(c) Andie Tanadi
(c) Andie Tanadi
(c) Andie Tanadi
yang menarik adalah dengan solusi dandelion chipping tube, saya dapat menggunakan lensa ini di nikon DSLR saya (D50) .Lensa : M42 Exa Bellow Tessar 50mm/f2,8 Jena DDR
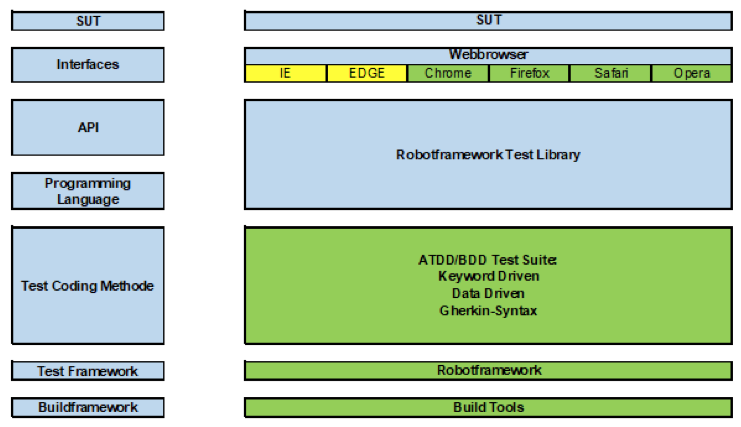
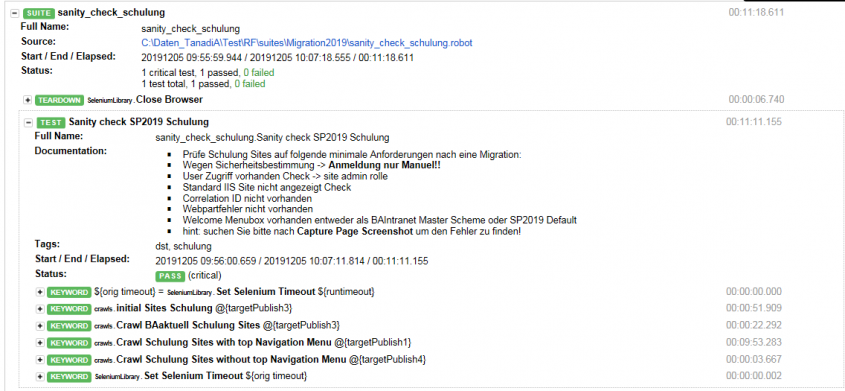
Dalam artikel ini saya ingin sedikit berbagi pengalaman saya dalam penerapan test automatisasi dengan Robotframework dalam bentuk pengujian bersyarat (Requirements based Testing)
Sebelum itu mari kita lihat dan pahami , apa arti Pengujian berbasis Persyaratan (Requirements based Testing) secara umum.
Apa itu Pengujian Berbasis Persyaratan? Pengujian berbasis persyaratan adalah pendekatan pengujian di mana kasus pengujian, kondisi, dan data berasal dari persyaratan. Ini termasuk tes fungsional dan juga atribut non-fungsional seperti kinerja, keandalan atau kegunaan.
Tahapan dalam Pengujian berdasarkan Persyaratan:
Menentukan Kriteria Penyelesaian Test :
Pengujian selesai hanya jika semua pengujian fungsional dan non-fungsional selesai.
Desain Kasus Uji: Kasus uji memiliki lima parameter yaitu:
keadaan awal atau prasyarat,
penyiapan data,
masukan,
hasil yang diharapkan,
hasil aktual.
Jalankan Test: Jalankan kasus uji terhadap sistem yang sedang diuji dan dokumentasikan hasilnya.
Verifikasi Hasil Test: Verifikasi apakah hasil yang diharapkan dan aktual cocok satu sama lain.
Verifikasi Cakupan Test: Periksa apakah pengujian mencakup aspek fungsional dan non-fungsional dari persyaratan.
Lacak dan kelola Kesalahan Software: Setiap Kesalahan yang terdeteksi selama proses pengujian melewati siklus hidup Kesalahan dan dilacak hingga penyelesaiannya. Statistik Kesalahan dipertahankan yang akan memberi kita status keseluruhan proyek.
Persyaratan Proses pengujian:
Pengujian harus dilakukan tepat waktu.
Proses pengujian harus menambah nilai siklus hidup perangkat lunak (software), oleh karena itu harus efektif.
Menguji sistem secara menyeluruh tidak mungkin dilakukan sehingga proses pengujian juga harus efisien.
Pengujian harus memberikan status keseluruhan proyek, oleh karena itu harus dapat dikelola. Dan biasanya untuk tujuan ini digunakan Test Management Tools (salah satu contohnya adalah Mantis / TestLink/ HP-ALM-Quality Center / Jira Plugin XRAY)
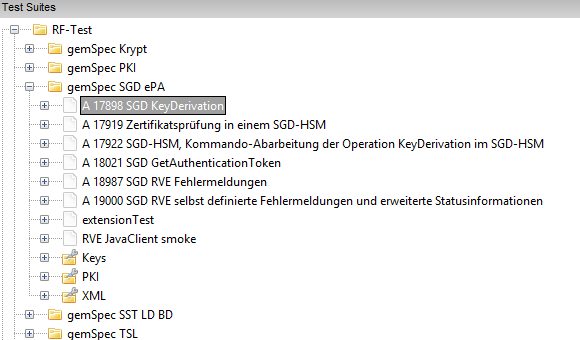
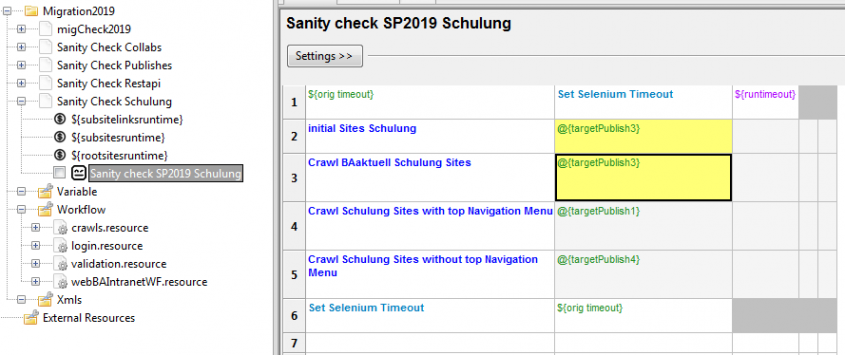
Contoh Desain Kasus Uji dengan Robotframework:
*** Settings ***
Documentation *Kriteria Penyelesaian Test:*
... Ein SGD ePA MUSS Folgendes sicherstellen: Wenn über dessen HTTPS-SGD-Schnittstelle (vgl. ) ein POST- Request mit dem Request-Body nach [gem_SGD_ePA#Tab_KeyDerivation-Request] eintrifft, so MUSS die RVE des SGD
... - das Zertifikat im Datenfeld *Certificate* gemäß TUC_PKI_018 prüfen und
... dabei Ergebnisse nach \ \ berücksichtigen.
...
... - die Kodierung und die Signatur der ""PublicKeyECIES"" prüfen (vgl. \ und ).
... Falls eine der Prüfungen ein nicht-positives Ergebnis liefert, so MUSS die RVE des SGD mit einer entsprechenden Fehlermeldung aus [gemSpec_SGD_ePA#] dem Client antworten und die weitere Requestverarbeitung abbrechen.
...
... Die RVE des SGD MUSS die Informationen aufbereiten und an das für den Request avisierte SGD-HSM übergeben (vgl.). Liefert das SGD-HSM ein OK, so MUSS die SGD die Antwort den HTTP-POST-Request mit folgender Nachricht beantworten:
... {
... \ ""Status"" : ""OK"",
... \ ""EncryptedMessage"" : ""... Base64-kodiertes Chiffrat. Das Chiffrat wurde vom SGD-HSM erzeugt ...""
... }
... Anderenfalls (SGD-HSM meldet einen Fehler) MUSS die RVE des SGD mit einer entsprechenden Fehlermeldung aus [gemSpec_SGD_ePA#] \ dem Client antworten.
*** Test Cases ***
A_17898-1
[Documentation] *Definisi Test:*
... - Am SGD ePA trifft über die HTTPS-SGD-Schnittstelle (vgl. A_17889) ein POST-Request mit dem Request-Body nach [gem_SGD_ePA#Tab_KeyDerivation-Request] ein: die RVE des SGD prüft das Zertifikat im - Datenfeld ""Certificate"" gemäß TUC_PKI_018 \ und berücksichtigt dabei Ergebnisse nach A_17896.
... - Die RVE des SGD prüft die Kodierung und die Signatur der ""PublicKeyECIES"" (vgl. A_17900 und A_17901).
...
... *Hasil Test:*
... - Beide Prüfungen liefern ein positives Ergebnis.
... - Die RVE des SGD bereitet die Informationen auf.
... - Die RVE des SGD übergibt die aufbereiteten Informationen an das für den Request avisierte SGD-HSM.
... - Das SGD-HSM liefert ein OK.
... - Die SGD beantwortet den HTTP-POST-Request mit folgender Nachricht:{\ ""Status"" : ""OK"",\ ""EncryptedMessage"" : ""... Base64-kodiertes Chiffrat. Das Chiffrat wurde vomSGD-HSM erzeugt ...""}"
[Tags] A_17898 gemSpec_SGD_ePA owner-at prio-1
[Setup] Enable Strict Validation
sgd-clientjavaWF.Vorbedingungen für Überprüfung
sgd-clientjavaWF.Schritt1
sgd-clientjavaWF.Schritt2
sgd-clientjavaWF.Schritt3
sgd-clientjavaWF.Schritt4
sgd-clientjavaWF.Schritt6
Kriteria Penyelesaian Test dapat anda implementasikan dalam fungsi [Documentation] pada Robotframework Test.
Verifikasi Cakupan Test dapat anda implementasikan dalam fungsi [Tags] pada Robotframework Test.
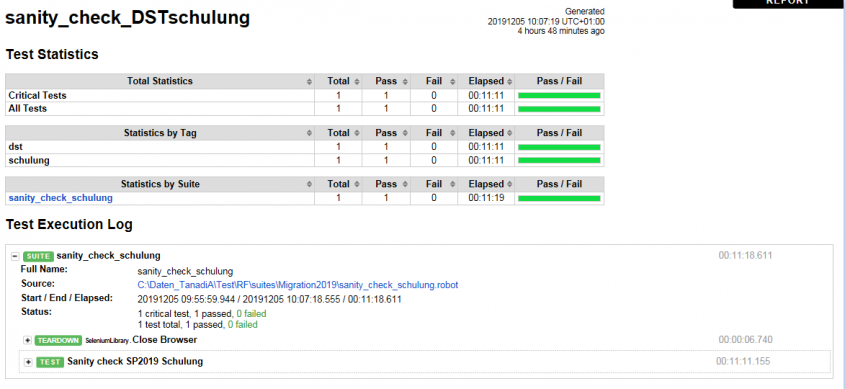
Verifikasi Hasil Cakupan Test akan dihasilkan oleh Robotframework Test Report dan Test Log, yang didalamnya menggambarkan jalur dan urutan Test anda.
Anda tidak membutuhkan Aplikasi atau Software extra untuk mengimplimentasikan Kriteria yang saya sebutkan di atas.
Hasil dan dokumentasi dari Test anda akan anda dapatkan selalu dari hasil akhir automatisasi Test anda dengan Robotframework.
Untuk anda yang tertarik untuk membeli chip ini silahkan menghubungi langsung Ebay seller ini
(c) andie tanadi
(c) andie tanadi
(c) andie tanadi
Seperti anda ketahui saya adalah kolektor beberapa kamera dan lensa analog Nikon. Seiring dengan perubahan waktu , saya mencari solusi untuk menggunakan lensa dan assesori Nikon saya di body Kamera DSLR saya (D50, D850).
Kalau anda menggunakan lensa AI, AIS , Bellow dan Macro Tube maka di display body kamera akan menunjukkan “F – -“ dan kamera tidak dapat mengambil foto, untuk “Profesional Level” model kamera nikon DSLR memiliki setting manual Lens dimana anda bisa memasukkan data focus length & rana terbesar lensa.
(c) andie tanadi
(c) andie tanadi
(c) andie tanadi
Kebanyakan lensa Nikkor AI, AIS tidak dapat berfungsi secara full di Body “Entry level” Model dari Nikon DSLR (contoh D50).
Sebenarnya ini adalah “Marketing Triks” Produser nikon untuk membatasi fungsi kamera terhadap lensa atau assesori tertentu untuk bisa dipakai dibody DSLR.
Solusi saya adalah memasang dandelion chip , sehingga body DSLR dapat di overide seolah olah mengetahui data maximal rana dan Focal length , sehingga bisa dipakai di entry Level DSRL (D50). Seperti jika anda menggunakan lensa Ais-P (45mm f/2.8 P, 500mm f/4 P dan 1200-1700mm f/5.6-8 P) ) atau seperti lensa-lensa dari Voigländer SLII dan Carl Zeiss ZF.2.
just one sample migrating ATDD Test from Coded UI to Robotframework.
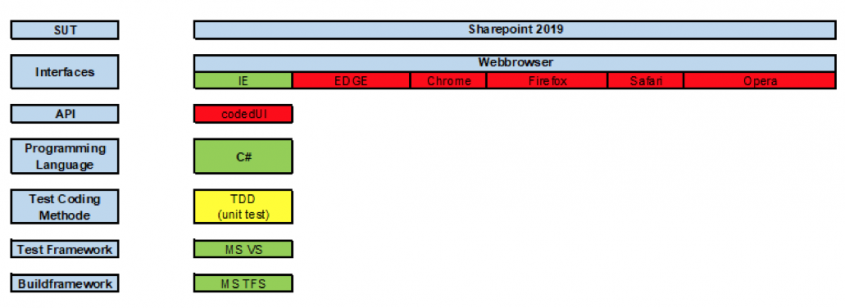
Before Test Structure:
CodedUI Unit Test Structure
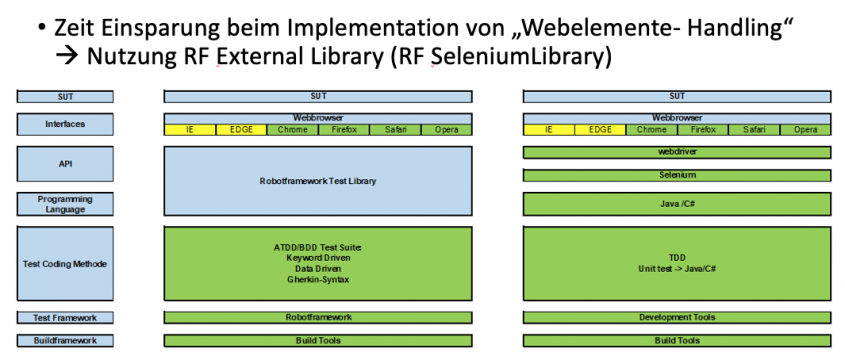
Comparison Unit Test & ATDD Test Structure:
Structure Comparison C# and Python with Selenium API
Reason for Migration from CodedUI to Robotframework:
CodedUI is now deprecated.
Test Tools and Ways of testing didn’t fullfill the requirement for doing ATDD test (E2E test) scopes.
Long test run .
Needs of proper test logging
Test run should be independance from SW build.
Only IE as browser is supported.
Proposed Robotframework ATDD Structure:
Robotframework ATDD Structure
Project / Test & Development enviroment Limitation:
Test Object: Sharepoint 2019 customisation
OS used for test object and testing: Microsoft Windows 10 OS
Build and test requrement tools: Microsoft TFS
Diffrent targets and build environment for: Development, Integration and Preproduction.
Needed Infrastukture and Software for Testing with Robotframework:
Python 3.x
Robotframework
Robotframework SeleniumLibrary
Robotframework Whitelibrary
Test editor Notepad ++ with Robotframework plugin
Test should be able to run as Selenium Hub trigger from MS TFS which consuming Robotframework xUnit reports as test run results.
Benefit of using Robotframework:
Test run faster than CodedUI
Test cases are written as Keyword Driven test, instead of Unit Test, these speed up the test cases creation and migration also simplify reusable of test cases.
No need using Visual Studio for creating test sases, you can use simple text editor r write tests.
Test results are more understandable for non-technical team members ( Test Manager, Project Manager, Environment Team, Solution Team)
Using RF Tag functionally and RF Report (Rebot) custom report can be created without any additional effort,
Report implementations of build on TFS over Xunit report flag on Robot runner.
Tests can run independently outside build tool.
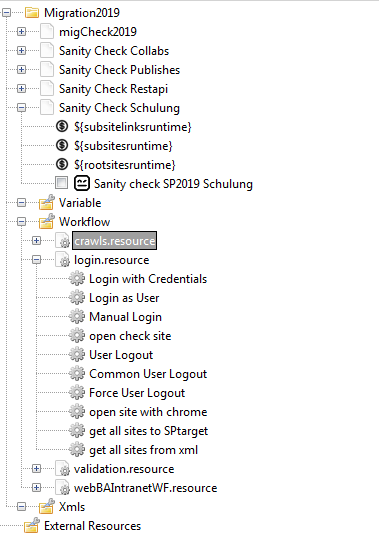
Starting the MIgration Steps:
Separating & creating all needed sharepoint UI keywords in UI Keyword resources.
Separating & creating all needed sharepoint 2019 application workflow as Keyword resources.
Creating template of sharepoint masterpage sites mapping as keyword resources.
Defining needed static and dynamic variables regarding to TCs and target test enviroment as variable resources
Creating RF runner files as batchfile for each target deployment enviroment (development, integration, or regresion)
Creating test suites regarding requirement (sanity test, fuctional test or regresion test)
Creating folder structure to map sharepoint functional requirement implementation
Creating folder structure for test reports, test suites and test runner.
Tagging related test suites regarding requirement coverage
Lensa ini sebenarnya dipakai untuk memprojeksikan slide atau film yang di ambil dengan Iscorama 54. Dengan lensa ini saya dapat memprojektsikan Slide Panorama dengan Kodak SA-V Projektor.